PID控制详解
PID控制详解
1 伺服电机三环(电流环、速度环、位置环)控制原理及参数调节
运动伺服一般都是三环控制系统,从内到外依次是电流环、速度环、位置环。
(1)电流环:电流环的输入是速度环PID调节后的输出,我们称为“电流环给定”吧,然后就是电流环的这个给定和“电流环的反馈”值进行比较后的差值在电流环内做PID调节输出给电机,“电流环的输出”就是电机的每相的相电流,“电流环的反馈”不是编码器的反馈,而是在驱动器内部安装在每相的霍尔元件(磁场感应变为电流电压信号)反馈给电流环的。
(2)速度环:速度环的输入就是位置环PID调节后的输出以及位置设定的前馈值,我们称为“速度设定”,这个“速度设定”和“速度环反馈”值进行比较后的差值在速度环做PID调节(主要是比例增益和积分处理)后输出的就是上面讲到的“电流环的给定”。速度环的反馈来自于编码器的反馈后的值经过“速度运算器”得到的。
(3)位置环:位置环的输入就是外部的脉冲(通常情况下,直接写数据到驱动器地址的伺服例外),外部的脉冲经过平滑滤波处理和电子齿轮计算后作为“位置环的设定”,设定和来自编码器反馈的脉冲信号经过偏差计数器的计算后的数值在经过位置环的PID调节(比例增益调节,无积分微分环节)后输出和位置给定的前馈信号的合值就构成了上面讲的速度环的给定。位置环的反馈也来自于编码器。
编码器安装于伺服电机尾部,它和电流环没有任何联系,他采样来自于电机的转动而不是电机电流,和电流环的输入、输出、反馈没有任何联系。而电流环是在驱动器内部形成的,即使没有电机,只要在每相上安装模拟负载(例如电灯泡),电流环就能形成反馈工作。
谈谈PID各自对差值调节对系统的影响:
1、单独的P(比例)就是将差值进行成比例的运算,它的显著特点就是有差调节,有差的意义就是调节过程结束后,被调量不可能与设定值准确相等,它们之间一定有残差,残差具体值您可以通过比例关系计算出。增加比例将会有效减小残差并增加系统响应,但容易导致系统激烈震荡甚至不稳定。
2、单独的I(积分)就是使调节器的输出信号的变化速度与差值信号成正比,大家不难理解,如果差值大,则积分环节的变化速度大,这个环节的正比常数的比例倒数我们在伺服系统里通常叫它为积分时间常数,积分时间常数越小意味着系统的变化速度越快,所以同样如果增大积分速度(也就是减小积分时间常数)将会降低控制系统的稳定程度,直到最后出现发散的震荡过程。这个环节最大的好处就是被调量最后是没有残差的。
3、PI(比例积分)就是综合P和I的优点,利用P调节快速抵消干扰的影响,同时利用I调节消除残差。
4、单独的D(微分)就是根据差值的方向和大小进行调节的,调节器的输出与差值对于时间的导数成正比,微分环节只能起到辅助的调节作用,它可以与其他调节结合成PD和PID调节。它的好处是可以根据被调节量(差值)的变化速度来进行调节,而不要等到出现了很大的偏差后才开始动作,其实就是赋予了调节器以某种程度上的预见性,可以增加系统对微小变化的响应特性。
5、PID综合作用可以使系统更加准确稳定的达到控制的期望。
伺服的电流环的PID常数一般都是在驱动器内部设定好的,操作使用者不需要更改。
速度环主要进行PI(比例和积分),比例就是增益,所以我们要对速度增益和速度积分时间常数进行合适的调节才能达到理想效果。
位置环主要进行P(比例)调节。对此我们只要设定位置环的比例增益就好了。
位置环、速度环的参数调节没有什么固定的数值,要根据外部负载的机械传动连接方式、负载的运动方式、负载惯量、对速度、加速度要求以及电机本身的转子惯量和输出惯量等等很多条件来决定,调节的简单方法是根据外部负载的情况进行大体经验的范围内将增益参数从小往大调,积分时间常数从大往小调,以不出现震动超调的稳态值为最佳值进行设定。
当进行位置模式需要调节位置环时,最好先调节速度环(此时位置环的比例增益设定在经验值的最小值),调节速度环稳定后,再调节位置环增益,适量逐步增加,位置环的响应最好比速度环慢一些,不然也容易出现速度震荡。
2 透彻理解电压前馈解耦算法
2.1 引言
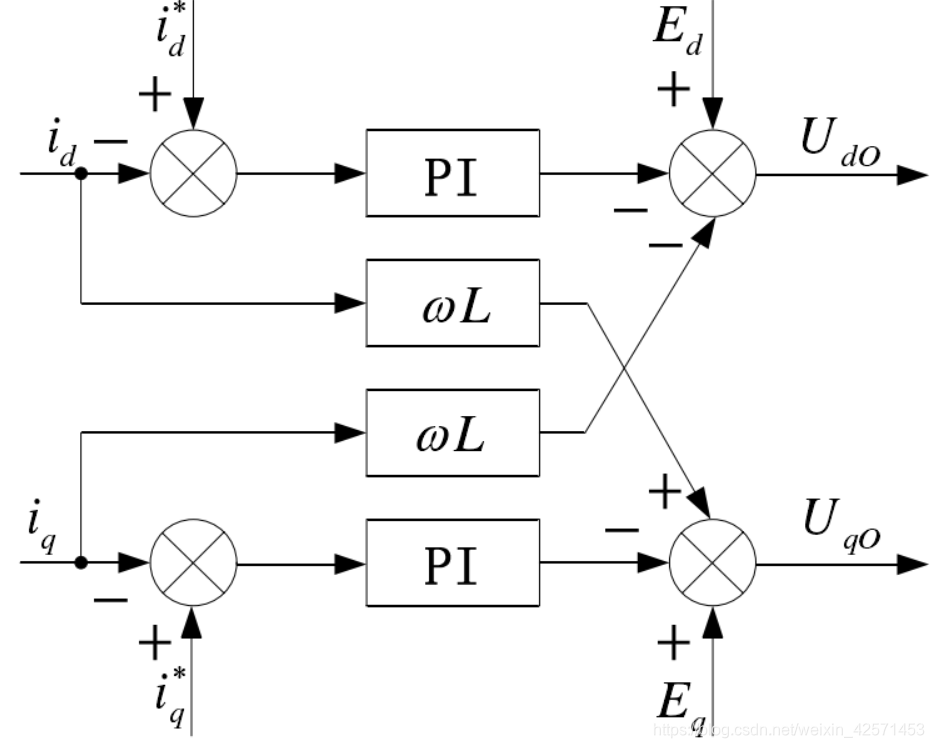
在电机控制、逆变器控制、PWM整流器等领域中,常使用电压前馈解耦方法用于电流内环的控制。但是之前本人不理解电压前馈解耦是如何实现的,认为这张图1里id、iq还是有耦合项。后面仔细看公式之后,算是对电压前馈解耦方法理解透彻了。
2.2 理论分析
以三相逆变器(整流器)为例,三相电流经ABC->dq变换后得到如下模型:
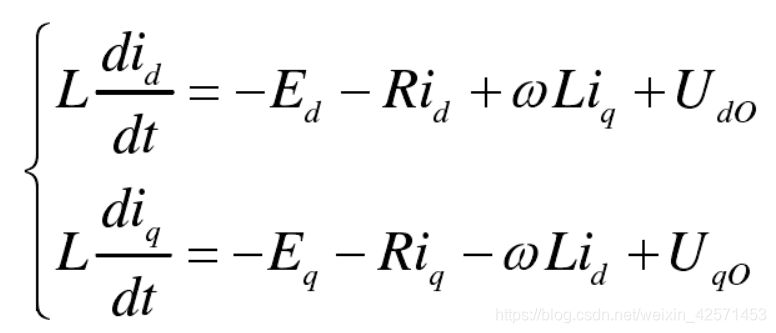
(1)
显然,id与iq在模型上互相有关,即互相耦合,为了使d-q轴的电流环设计完全一样,我们需要对它进行解耦合。
① 把式(1)左右移相,得式(2):
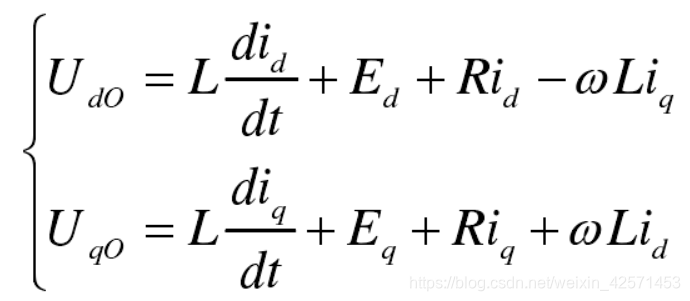
(2)
② 电流调节器采用PI控制器,则式(2)变换为式(3):
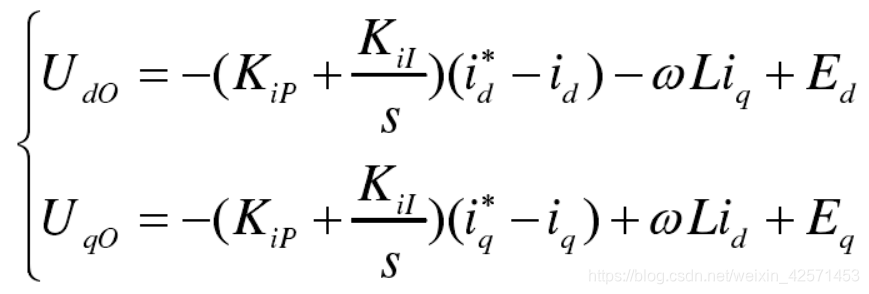
(3)
③ 把式(3)带入式(2)中,得式(4):
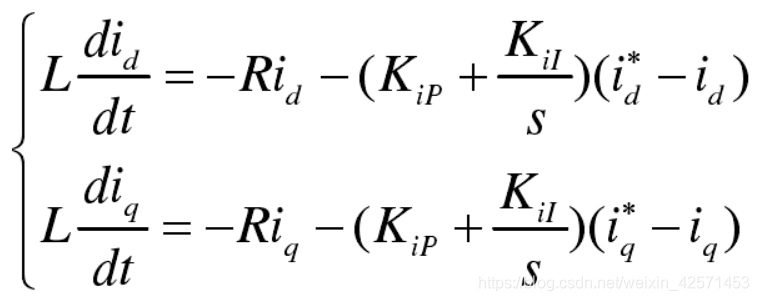
(4)
④显然,与式(1)相比,式(4)中id与iq实现了完全解耦,并且完全对称。所以dq轴电流环可以独立设计,并且完全一样。
3 内环电流PI解耦控制
我们直到一般对于MMC分为两层:一层是内环的电流控制,另一层是外环的功率控制。这次我们讲解内环的电流控制。
我自己在学习这一块的时候,听到的第一个概念就是MMC内环电流控制需要解耦。这个解耦是什么意思?谁和谁耦合了?解耦的目的到底是什么?
我们首先来看上次建立的MMC系统函数。

所谓耦合是指这么一件事。我们现在有两个可控的输入量udiffd和udiffq,对应是d轴和q轴的差模电压。一个很自然的想法就是d轴的电压控制d轴的电流,q轴的电压控制q轴的电流。但实际上我们一看上面的系统框图就直到,这样是不可能的。
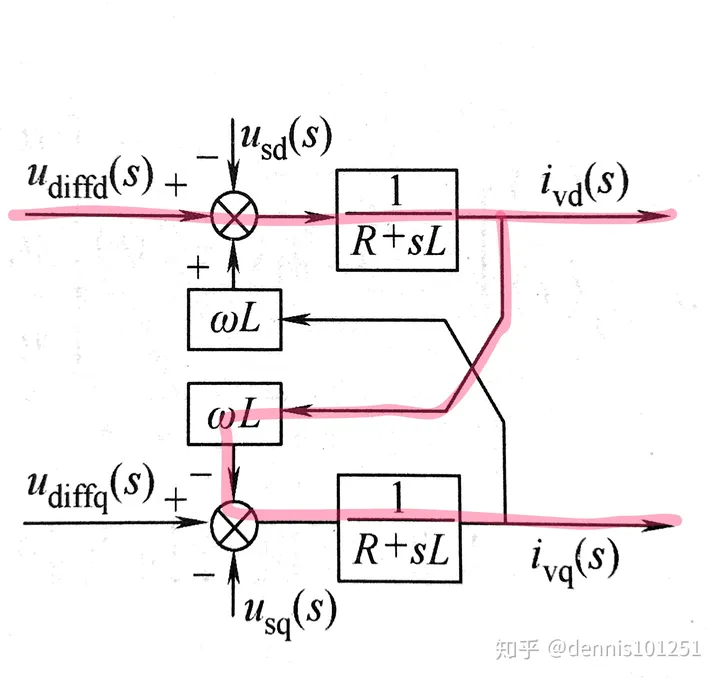
看我标红的线路就知道,q轴的电流既受q轴电压控制还受d轴电压控制,d轴电流同理。这就说明d轴和q轴之间有耦合,两者不是独立的。
一个自然的想法是能不能将dq轴解耦,我单独控制d轴的电压就只影响d轴的电流,而不影响q轴的电流,如果能这样,我不就可以用传统的PI控制来做了么。答案是当然可以。
一个通用做法是这样,我们先定义一组新的量。
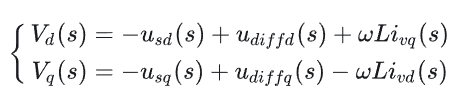
一个简单的变量替换,将系统右边的量打包成一个量。
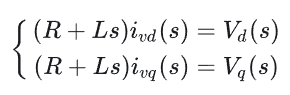
再看系统,两个式子的输入输出都完全独立开了,没有交叉项。这样来看,d轴与q轴就解耦了。画成框图如下。
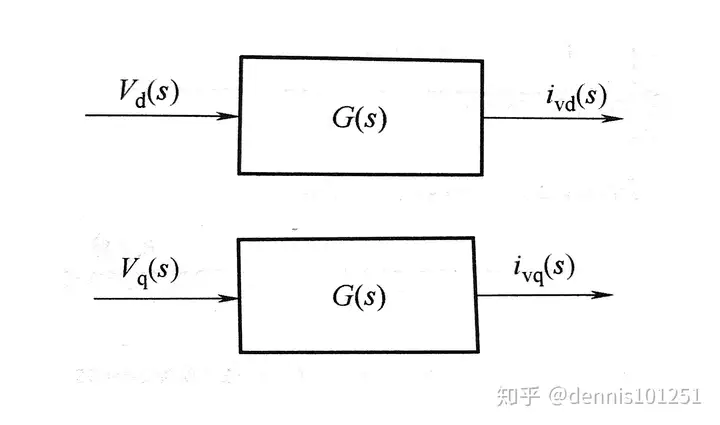
有人要说这啥都没做,只是做了一个变量替换这么就算解耦了?我们还需要继续构造Vd(s)和Vq(s)。
如何得到这两个量呢?直接用PI控制器就可以得到。
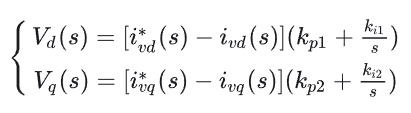
画成框图长这样。
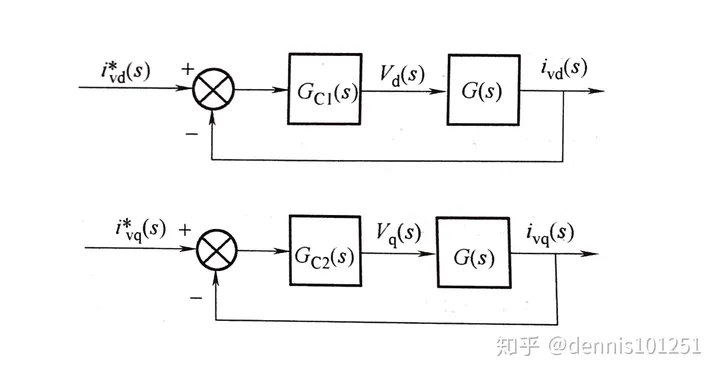
我们再回头看这样的解耦是不是自欺欺人。对于d轴量,我知道实际电流和参考电流,就可以通过PI控制器得到Vd(s),而ivd(s)仅受Vd(s)控制,所以可以形成一个闭环控制。
上面这个框图的中间变量是Vd(s)和Vq(s),我们MMC的输入只有量udiffd和udiffq。所以还需要用上面的式子把实际的控制变量udiffd(s)和udiffq(s)反解回来。
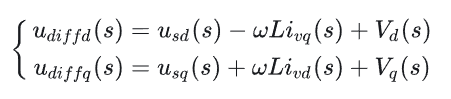
代入刚才的表达式为:

画成框图就长这样:
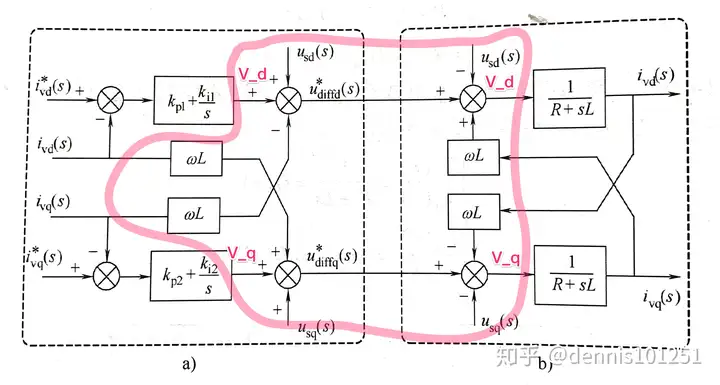
用红色勾出来的是解耦的部分。
所以虽然看这个控制框图很复杂,但其实上下两条dq轴的控制逻辑实际上是完全独立的。我们给出一个d轴的参考电流,只会控制d轴的电流,而不会影响q轴的电流。
 wechat
wechat- alipay