三相LCL变流器电流环建模及电流闭环控制探索
三相LCL变流器电流环建模及电流闭环控制探索
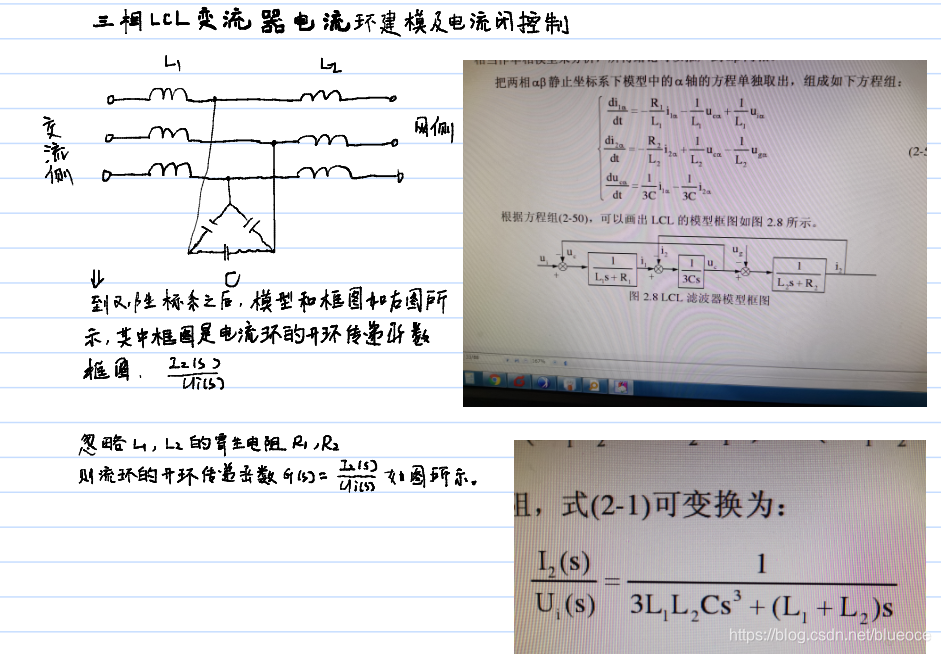
1 三相LCL电流环建模及电流闭环控制
1、G(s)是电流环的s域模型,不能叫开环传递函数。
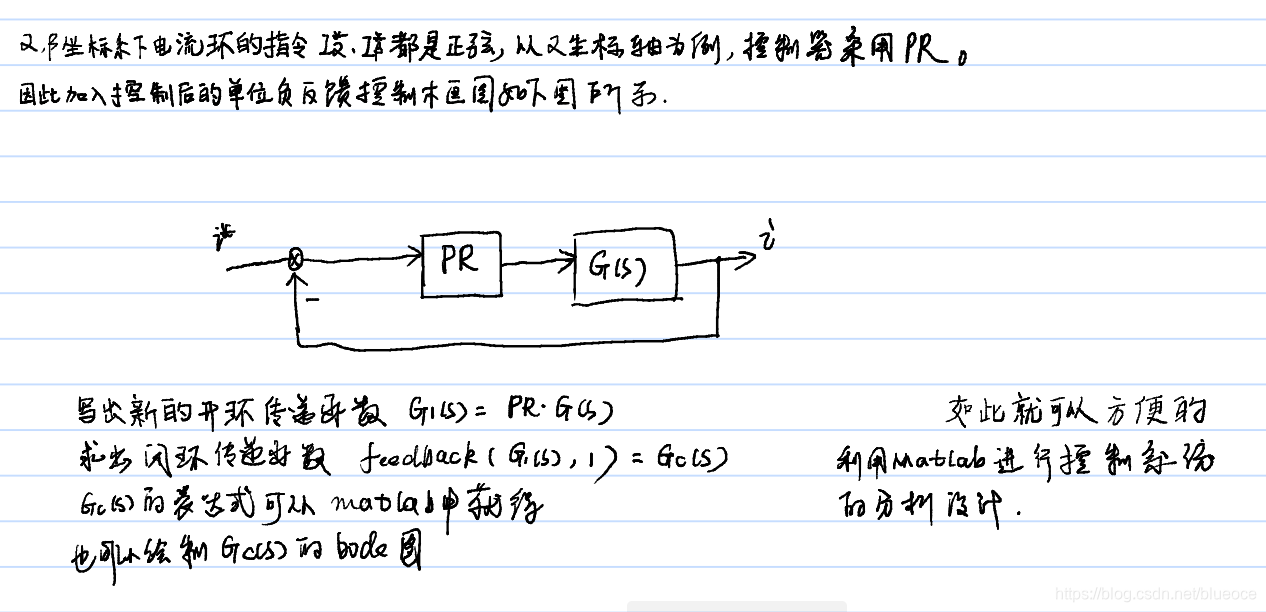
2、在单位负反馈下,PR(s)*G(s)即是前向通道传递函数,也是开环传递函数。
1 | %LCL的PR电流环研究 |
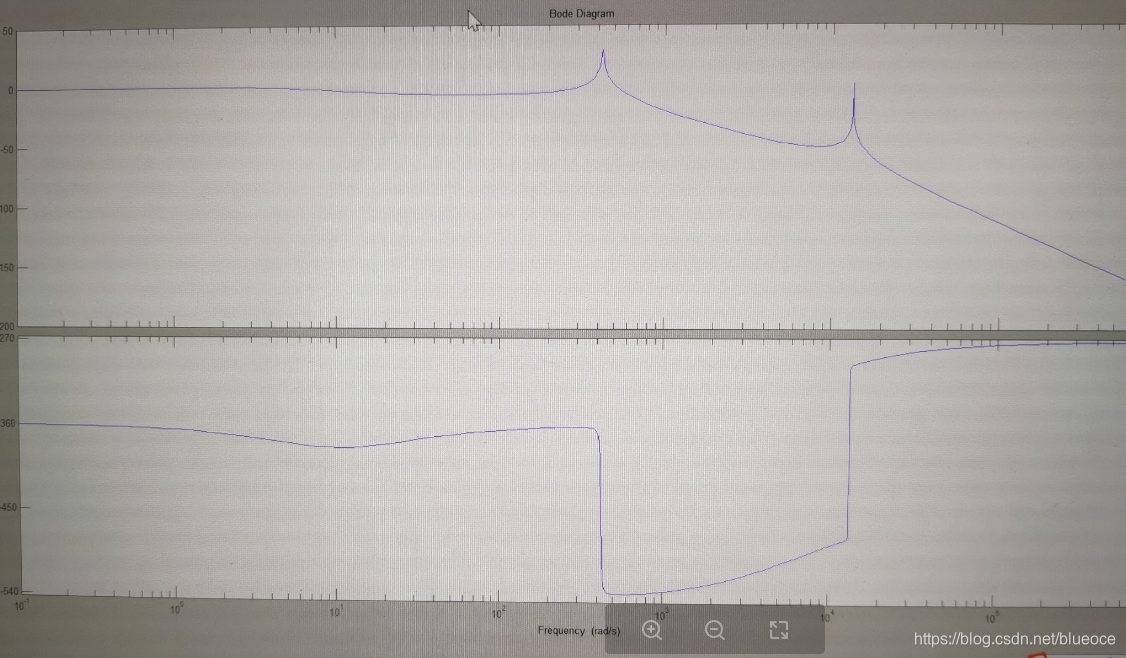
需要相应的方法处理掉第二个谐振点。
2 三相并网逆变器电流环解耦
逆变器的框图如下所示:
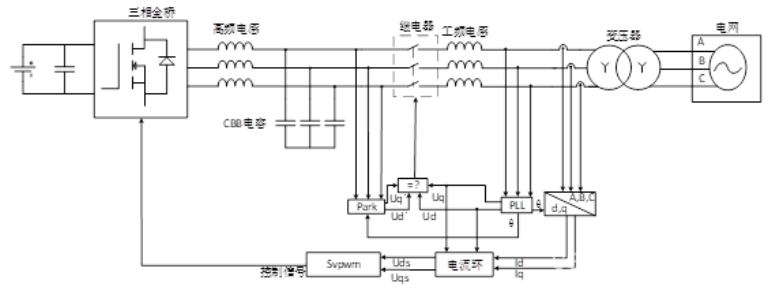
图1 三相并网逆变器控制框图
L型
本小节将着重讨论图1中电流环的内容,由于LCL模型较为复杂,工程上将LCL当L来进行建模及控制,即控制高频电感的电流,图1框图进行简化后,可得到简化电路图:
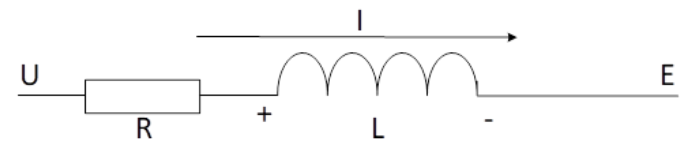
图2 电感电路图
图2中R为高频电感等效电阻,根据图2以及电感特性可得到以下方程。
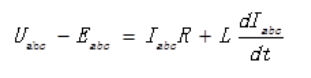
公式中,为了分析的方便,将三相静止坐标系下的数学模型变换到两相垂直静止坐标系下进行分析(等幅值变换)即:

T变换矩阵为:
公式中,那么很显然公式2的相应逆变换也可以表示为:
将变换代入1中并化简可得到:
再将两相垂直静止坐标系下的数学模型变换到同步旋转dq坐标系下的数学模型,即:
T(θ)变换矩阵为:
同理,由于该变换矩阵内的元素是时间的函数,联立5和6可得:
公式中同步旋转角速度由图1中可知,该角速度由PLL(锁相环)提供,且再进行拉普拉斯变换可以得到系统在同步旋转坐标系下并网逆变器领域的数学模型:
我们可以看到d轴里有q轴的分量,我们想要的是什么呢?没错就是q轴和d轴能独立的控制,Iq和Id代表啥?代表的是有功功率和无功功率,如果能独立控制岂不美哉?我们就能分别指定无功功率输出多少,有功功率输出多少,那么在今年电赛的B题中功率因数可调其实就是调节无功功率,功率因数为1就是无功功率为0,只输出有功功率,你可能要问为什么题目中是整流器,今天讲的是逆变器你能扯上关系,其实无论整流还是逆变,在这个控制系统里面,都是一个控制逻辑,如果逆变器输出电流为你设定的正,那么你设置输出有功电流为为1A那就逆变出去1A,如果你要整流,直流源换成负载,设置电流为-1A,就整流回去了。
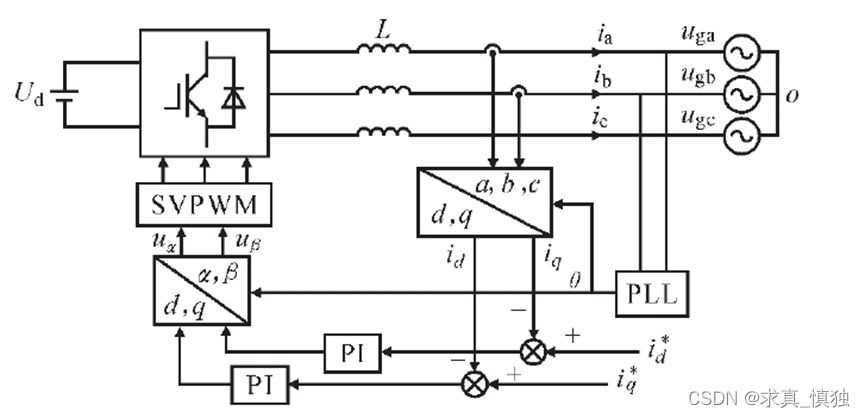
三相并网逆变器结构图如下所示:
图3 L型滤波电路框图
由图3可以得到dq轴间存在耦合,且存在电网电压的扰动,故设计以下控制器对系统进行解耦:
图4 电流环控制图
电流环用数学可表达为:
id*就是idset,kp+ki/s就是pi调节器的传递函数,这个没啥好说的,这里就是你DSP里面写的内容,Ud和Uq可以通过锁相环的角度进行park反变换然后产生svpwm调制波。
该电流环输出的Ud(s)和Uq(s)即可使用Park反变换进行svpwm相关计算,最终产生PWM波通过驱动电路驱动MOS管,将该电流环与电路的模型联合起来可得以下框图:
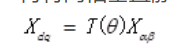
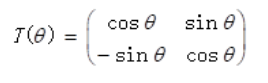

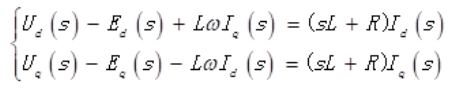
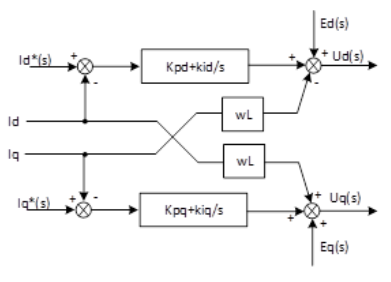

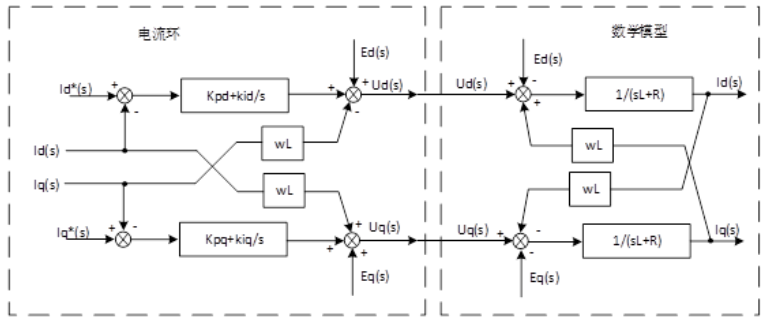
图5 系统总体框图
即将公式代入9中,进行整体化简后可得以下方程:
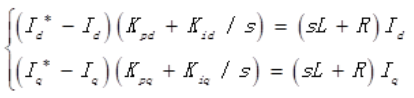
于是就实现了解耦,可以看到两个轴之间已经完全没有联系,kp和ki能独立调节,而且也消除了Ed、Eq项,其实就是电网电压的因素,也就是说这个时候kp、ki只与电路参数有关,那么我们还需要分析它的稳定性,我们求出输出电流的Id、Iq和他们设定值的传递函数,其实就是对上面的公式进行一个变换,同时因为电感电阻一般比较小,所以我们为了方便就省略了它。
- 相对于公式9,电网电压扰动项与耦合相已消去,解耦后得到的dq轴互相独立并且都只与系统的电感值有关,且dq轴完全对称,故以下仅针对d轴传递函数进行讨论,对上述公式进行变形,且由于电感电阻一般比较小,为分析方便将该电阻进行忽略,可得输出值与设定值的传递函数为。
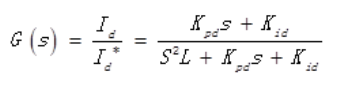
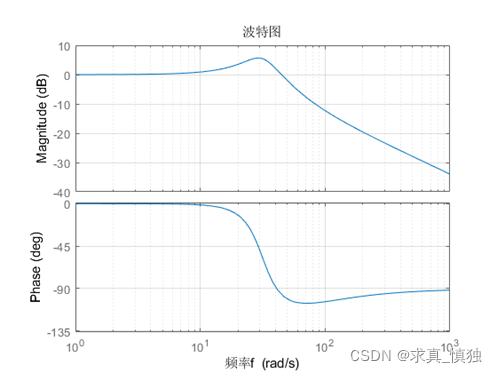
将Kp=0.02,Ki=10,L=1mH代入,使用matlab工具可得到以下bode图,根轨迹以及阶跃响应。
图6 bode图
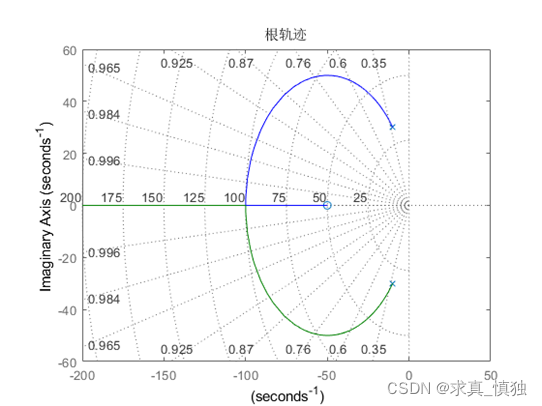
图7 根轨迹图
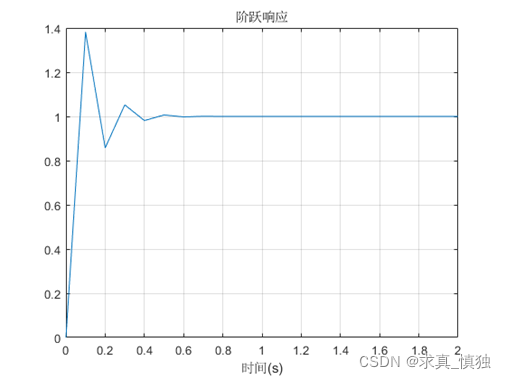
图8 阶跃响应曲线
根据图可知,该系统的幅值裕度远大于12db,相位裕度大于45度,根轨迹均在左半平面,故该系统为一个稳定的系统。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21kp=0.02;
ki=1;
L=1*10^-3;
s=tf('s');
G=(kp*s+ki)/(L*s^2+kp*s+ki);
figure(1);
bode(G);
xlabel('频率f');title('波特图');
grid
figure(2);
rlocus(G);
xlabel('');title('根轨迹');
grid
figure(3);
t = 0:0.1:2;
y = step(G, t);
plot(t, y);
xlabel('时间(s)');title('阶跃响应');
grid
3 如何用频域法求解PI参数
首先PI环和被控对象是串联在一起的,也就是说整体的传递函数是PI调节器的传递函数 乘以 被控对象的传递函数。
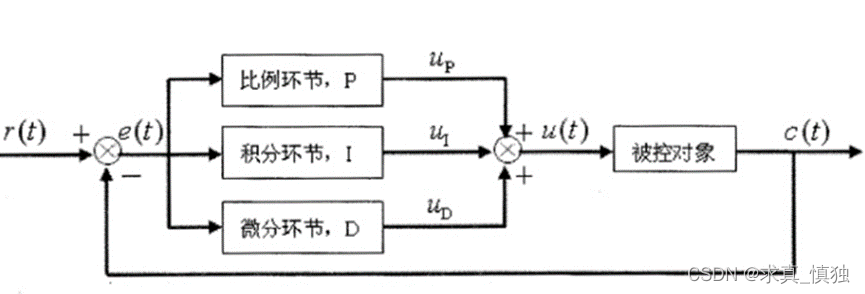
这里以被控对象为一阶惯性环节为例,一阶惯性环节的传递函数如下所示:
而PI调节器的传递函数为:
这两者相乘传递函数为:
接下来就是自控里面的知识,分别对这个传递函数求幅值裕度和相位裕度:
就是穿越频率,这个频率一般在开关频率的10 ~ 20分之一倍,也就是开关频率是100k的电路,穿越频率在10k到5k之间,当然这是经验值。上述公式也说明系统在穿越频率点的增益为1。求得传递函数的相位角,方程右边的分子上Margin代表的是相位裕度,这个值一般在45 ~ 90之间,而分母就是把角度变成弧度。
对于上述计算再次说明。求幅值,也就是把实部平方加虚部平方再一起开方,上述角度求的是相位角,复数的幅角是把分子的弧度减去分母的弧度,其中对于s这一项由于虚部为0,两个未知数两个方程,解出后即可。

- wechat
- alipay