PID传递函数模块及Matlab调试和传递函数离散化
PID传递函数模块及Matlab调试和传递函数离散化
1 simulink中微分模块、传递函数模块使用
大多数物理系统可以用微分方程来描述,因此可以用连续系统模拟。最简单的模型为线性模型和定常模型。
在simulink中,用来模拟连续系统的模块有四种:增益模块、求和模块、微分模块、积分模块。另外,传递函数模块也常常用来模拟物理系统和控制器。
1.1 积分、微分模块
积分模块:
- 定义:计算输入信号从起始时间到当前时间对时间的积分,即:对输入信号积分。
- 需要初始化条件。
- 连续状态。
微分模块:
- 定义:计算输入对时间的变化率。
- 根据输出的返回的差值来拟合输入变化的速率。
实例:在simulink中选择正弦信号作为输入信号,并选择微分模块作为微分程序,利用示波器输出微分后的信号波形。
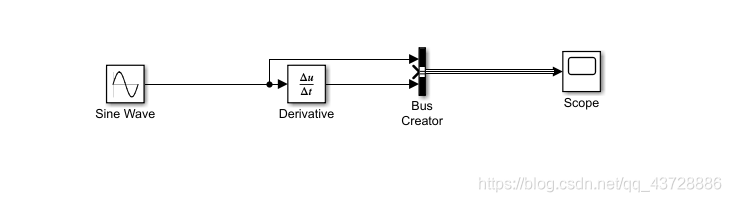
输出波形:
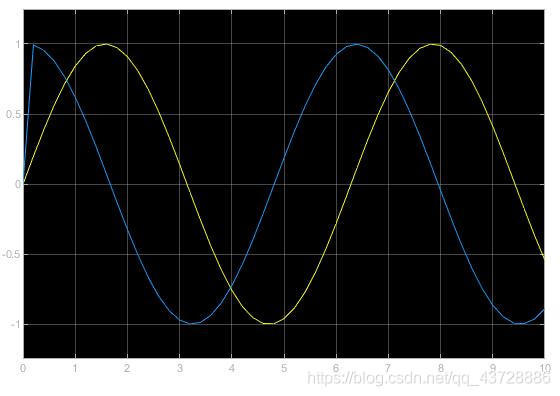
输入波形为黄色,输出波形为蓝色。输入波形为正弦信号,由于微分模块作用,因此输出模块为余弦信号,在本例中由于0时刻,初始值为0,因此输出信号波形在0时刻有突变。
1.2 传递函数模块使用及举例应用
传递函数模块表示法频繁用于控制系统设计和系统的动态模拟,传递函数的定义为系统在零初始状态下输出的Laplace变换与输入的Laplace变换之比。因此,传递函数是一种描述系统动力学输入输出关系的简便方法。
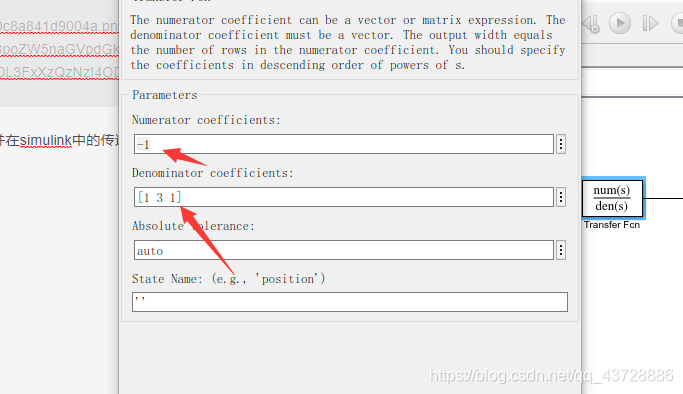
在本例中,以二阶低通滤波器为例,在simulink中应用传递函数模块,阶跃信号作为输入信号,并用示波器展示输出信号波形。
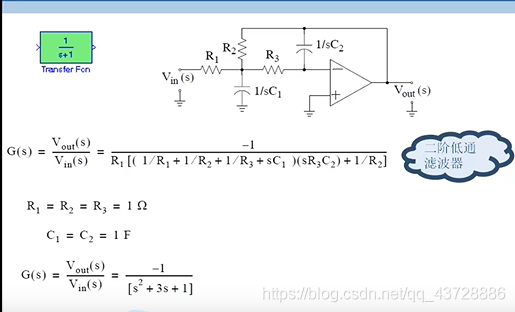
其中,传递函数为:(-1) / (s^2 + 3s + 1),并在simulink中的传递函数模块设置分子、分母参数。
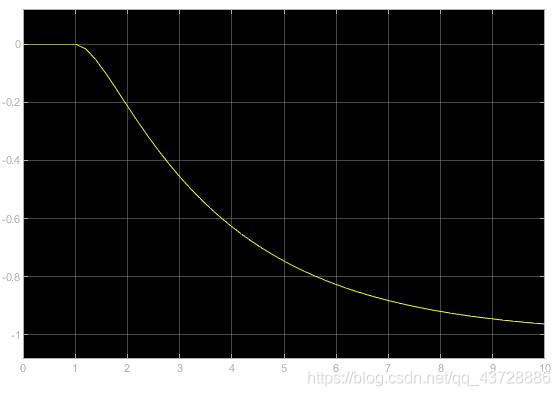
输出波形:随时间发生衰减,并最终稳定于-1。
1.3 Matlab中波特图使用方法
首先,在Matlab命令窗口中输入help bode学习下如何使用波特图。得到help文档:
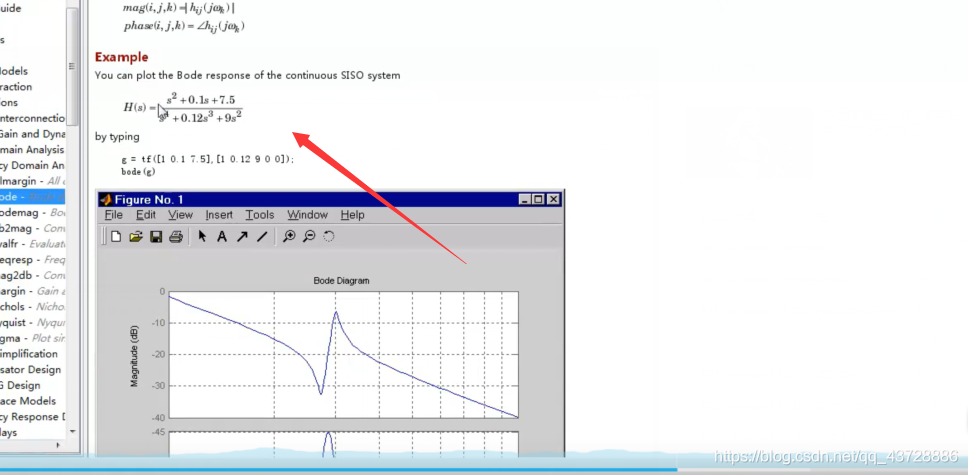
在该文档中可以看出,在使用波特图之前,需要先定义传递函数,上图红箭头指的是help文档给我们举的例子,以下是我们利用上面的传递函数得到的波特图,传递函数:(-1) / (s^2 + 3s + 1)
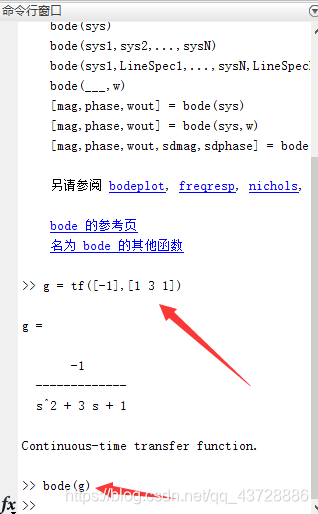
首先,在命令行窗口,如上图箭头指示那样,我先令g等于传递函数表达式,然后利用bode(g)指令绘制波特图,并得到如下图:
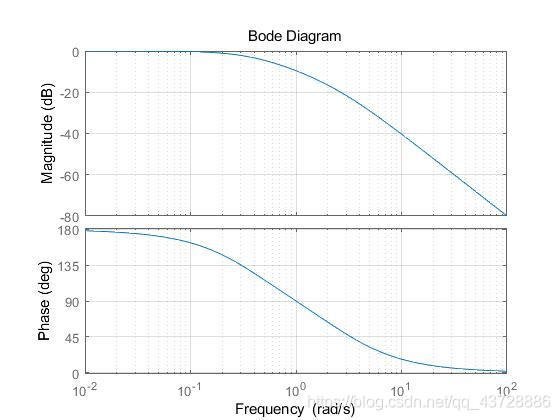
从这个图中可以看到:随着输入信号频率的增加,对应的通过的幅值信号衰减比较严重,而在频率较低的情况下,信号比较容易通过,因此为低通滤波器。
2 PID控制参数Matlab调试
2.1 序
首先最重要的是了解每个参数调节了系统响应的哪些属性,通过观察响应从而调节参数改变属性。
PID作用概述:
- P产生响应速度和力度,过小响应慢,过大会产生振荡,是I和D的基础。
- I在有系统误差和外力作用时消除偏差、提高进度,同时也会增加响应速度,产生过冲,过大会产生振荡。
- D抑制过冲和振荡,过小系统会过冲,过大会减慢响应速度。D的另外一个作用时抵抗外界的突发干扰,阻止系统的突变。
同时调节顺序是:P > I > D
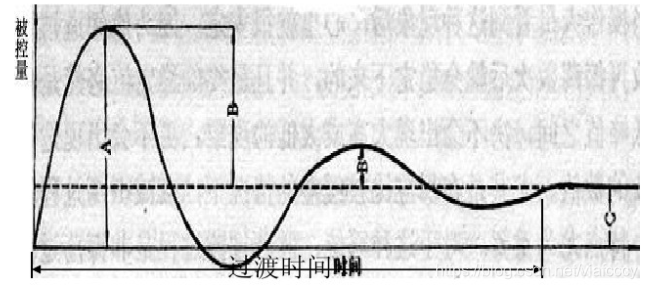
PID调节目标:
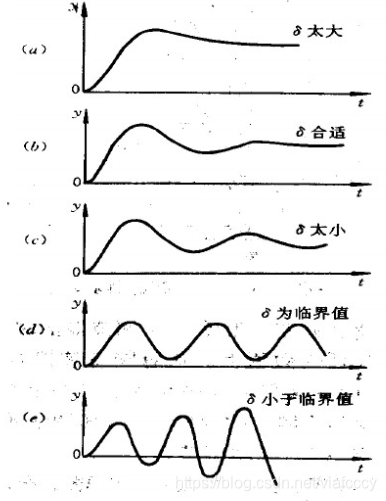
- 衰减比在4-10之间最佳,也就是响应曲线的前两个幅值B:B1的比值在4-10之间。
- 稳态误差趋近于0。
- 系统响应越快越好。
2.2 P参数选取
tip:在第一步牢记P产生响应速度和力度,过小响应慢,过大会产生振荡,是I和D的基础。
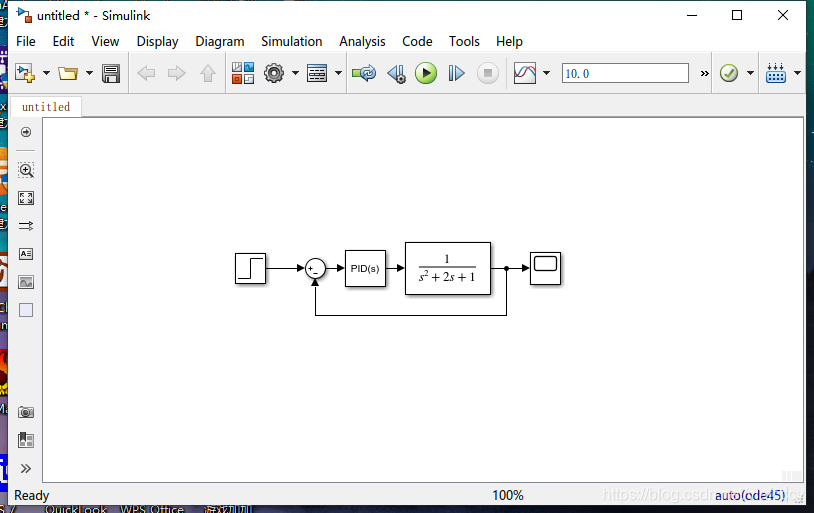
如果想自己调试尝试可以打开matlab,运行simulink,照着下面的图进行连接,如果想直接应用可以往后看。
图中的系统为一个PID控制二阶系统。
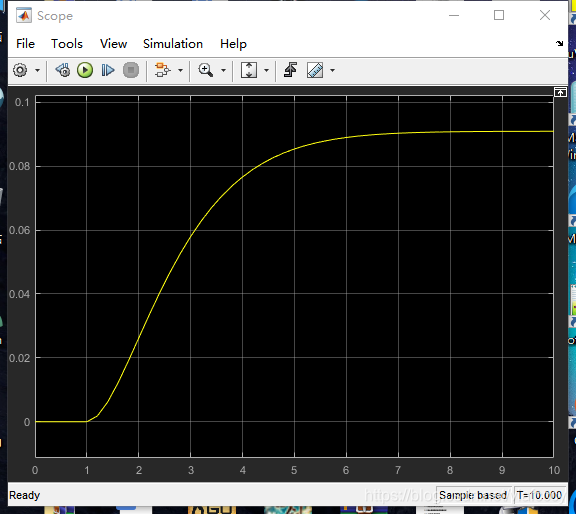
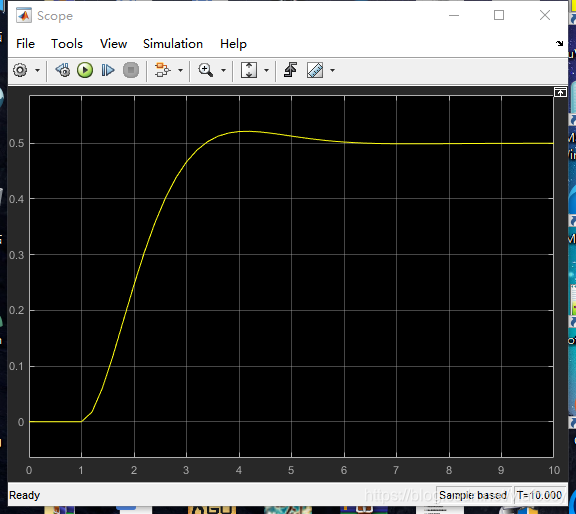
拿上面的系统进行举例,首先设定P=0.1,I=0,D=0观察响应。可以看到图像没有超调,说明P产生的响应速度和力度太小了。
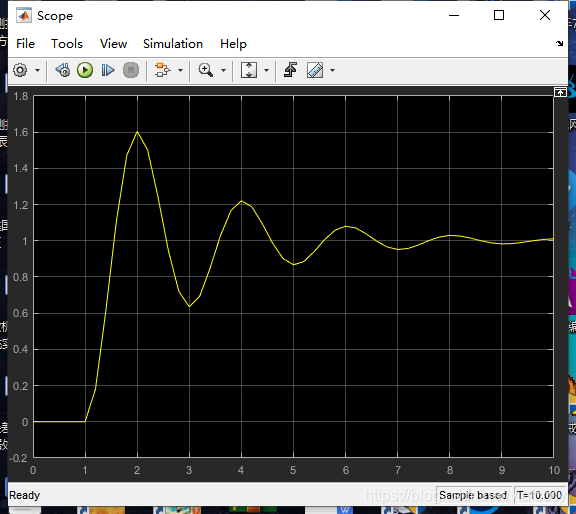
P=1,I=0,D=0观察系统响应,超调量出现但是只有一个波形,同时也就意味着调节时间太慢了,继续加大P。
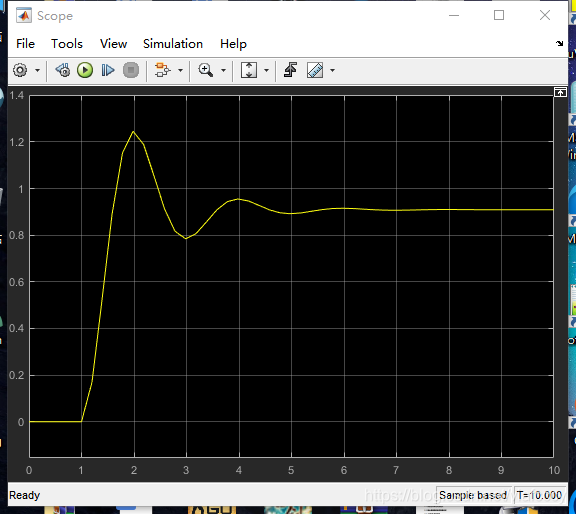
P=10,I=0,D=0,此时调节时间显著下降,可以看到此时的数量级已经调整完成,也就是P参数只需要微调。
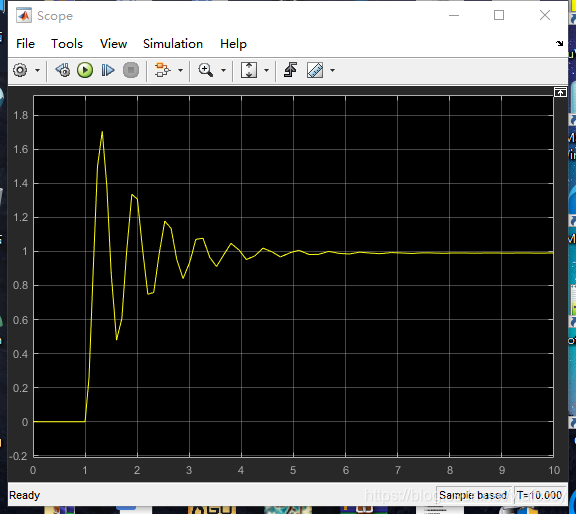
P=100,I=0,D=0,系统开始变得振荡。
如果继续加大P,系统会达到一个临界值,产生等幅振荡,最后开始发散,如下图。
2.3 I的调节
tip:I在有系统误差和外力作用时消除、提高精度,同时也会增加响应速度,产生过冲,过大会产生振荡。
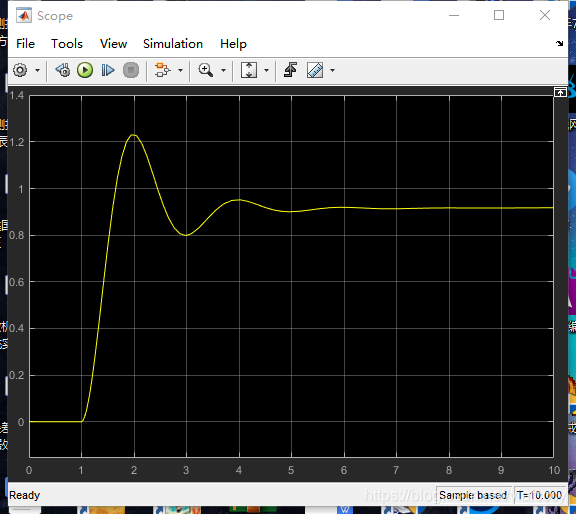
I主要调节稳态输出,消除扰动。由于系统没有扰动输入因此看不到I对于消除扰动的效果。P=10,I=10,D=0,此时I过大导致系统振荡加剧。
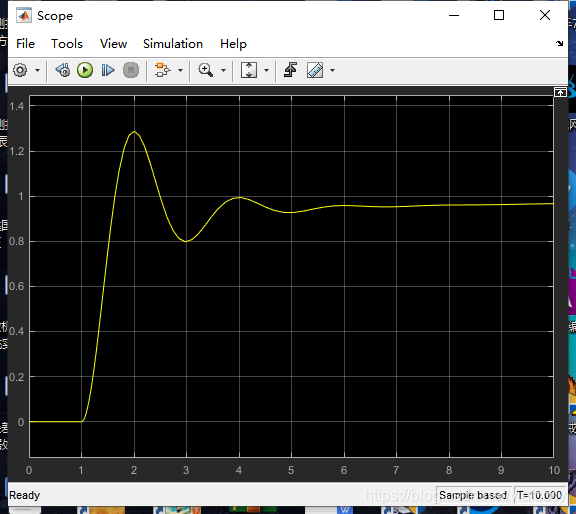
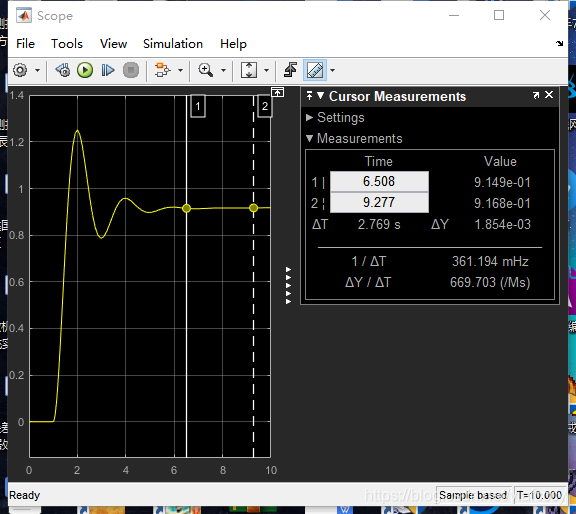
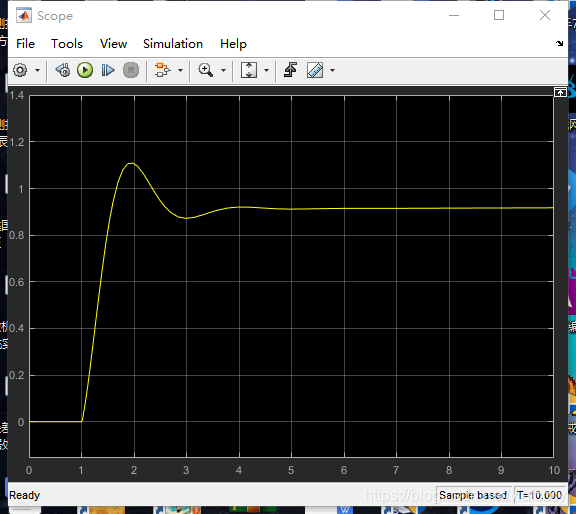
P=10,I=1,D=0,此时响应波形基本符合预期。观察稳态输出约为0.963左右。
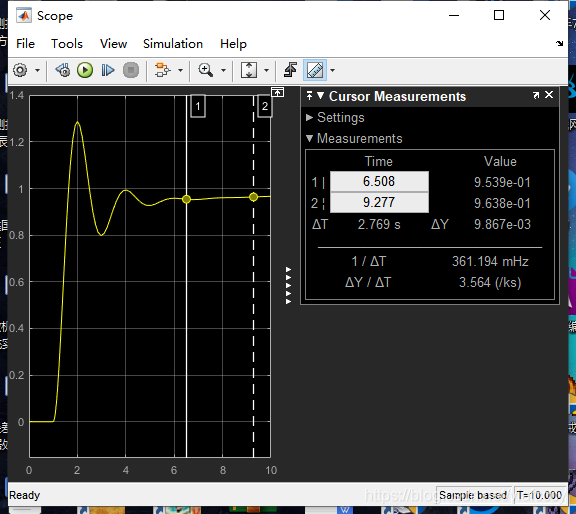
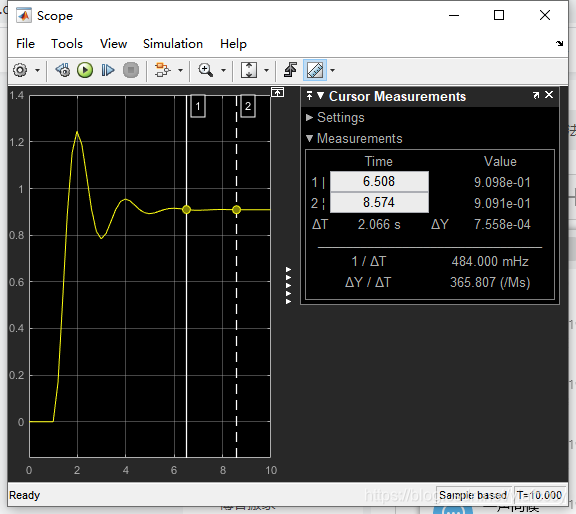
P=10,I=0.1,D=0,可以看到几乎响应波形没有变化。说明在没有扰动的情况下I只要不过大影响不大。但是稳态输出变化为0.916。
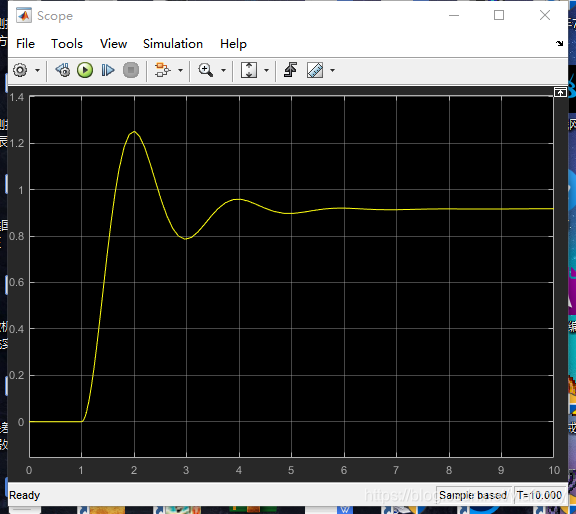
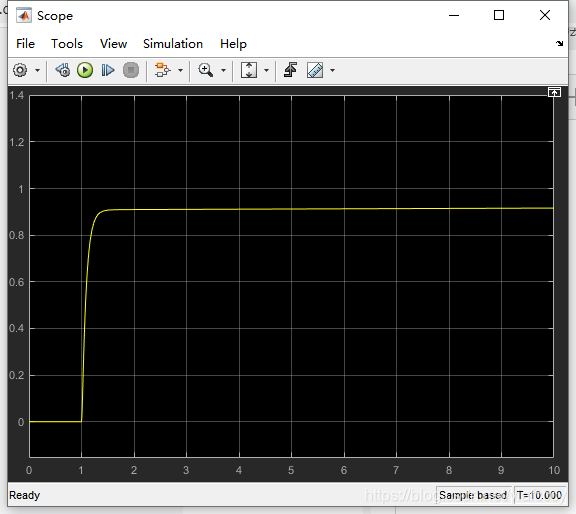
P=10,I=0,D=0,稳态输出变为0.91左右。
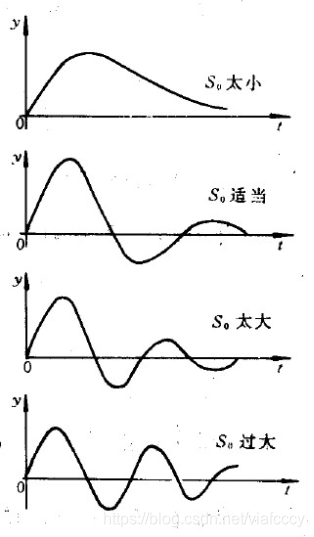
最终我们可以通过I少量调节稳态输出的值,最终将稳态误差消除。关于I对波形影响的作用总结如下图:
2.4 D的调节
tip:D抑制过冲和振荡,过小系统会过冲,过大会减慢响应速度。D的另一个作用是抵抗外界的突发干扰,阻止系统的突变。
P=10,I=0.1,D=10,可以看到将所有的冲击都消除掉了。
P=10,I=0.1,D=1,消除冲击减弱,此时显然衰减比不符合要求。
P=10,I=0.1,D=1,此时基本符合要求。
2.5 总结
首先调节P的数量级达到一个只有2个左右明显峰值的波形,再调节I找到不会波形振荡也不会没有超调的的区间,在区间内找到一个I将稳态误差尽可能消除。最终使用D来控制衰减比和波形的峰值、超调量。最后根据要求的稳态值、调节时间、超调量、上升时间、峰值时间等指标进行微调达到目标。
参数整定找最佳,从小到大顺序查,
先是比例后积分,最后再把微分加,
曲线振荡很频繁,比例度盘要放大,
曲线漂浮绕大湾,比例度盘往小扳,
曲线偏离回复慢,积分时间往下降,
曲线波动周期长,积分时间再加长,
曲线振荡频率快,先把微分降下来,
动差大来波动慢,微分时间应加长,
理想曲线两个波,前高后低4比1,
一看二调多分析,调节质量不会低 。
3 传递函数如何离散化转化为差分方程
3.1 前言
我们在Matlab/Simulink做实验仿真的对象一般习惯使用s域传递函数,但是真正转化到单片机中时,又无法识别传递函数,因此需要进行传递函数的离散化,转化为差分方程来处理。
离散化的目的:
- 将s域下的传递函数转换为离散的z域函数。
- 将离散域下的函数转化为差分方程,然后在单片机中实现。
3.2 传递函数形式
一阶惯性环节形如以下形式:
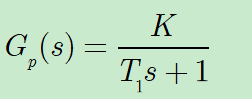
如何将上式改写成差分方程,需要按照下述流程。S域传递函数——Z域离散函数——差分方程。第一步先将其离散化。
3.3 离散化方法
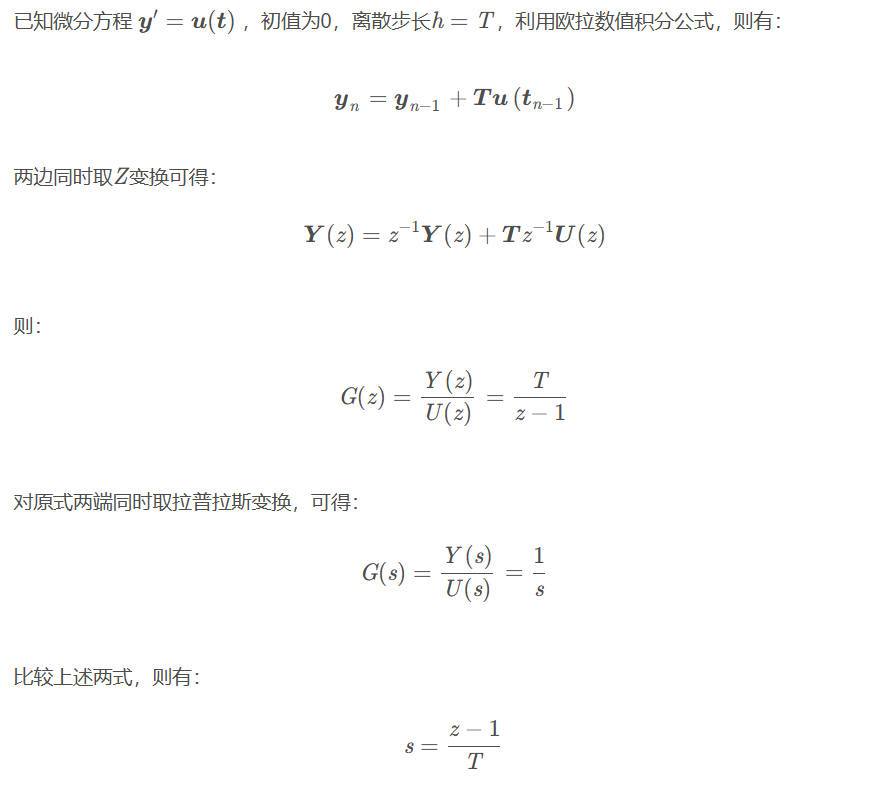
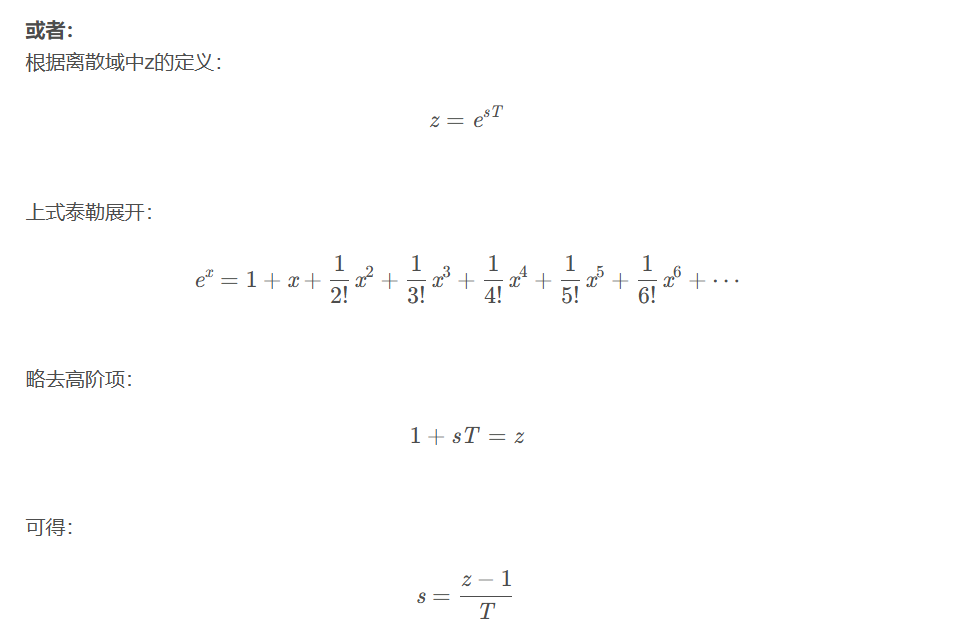
3.3.1 一阶向前差分
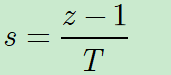
将传递函数中的s使用上式进行替换即可,接下来是推导过程。(T为离散化采样时间)
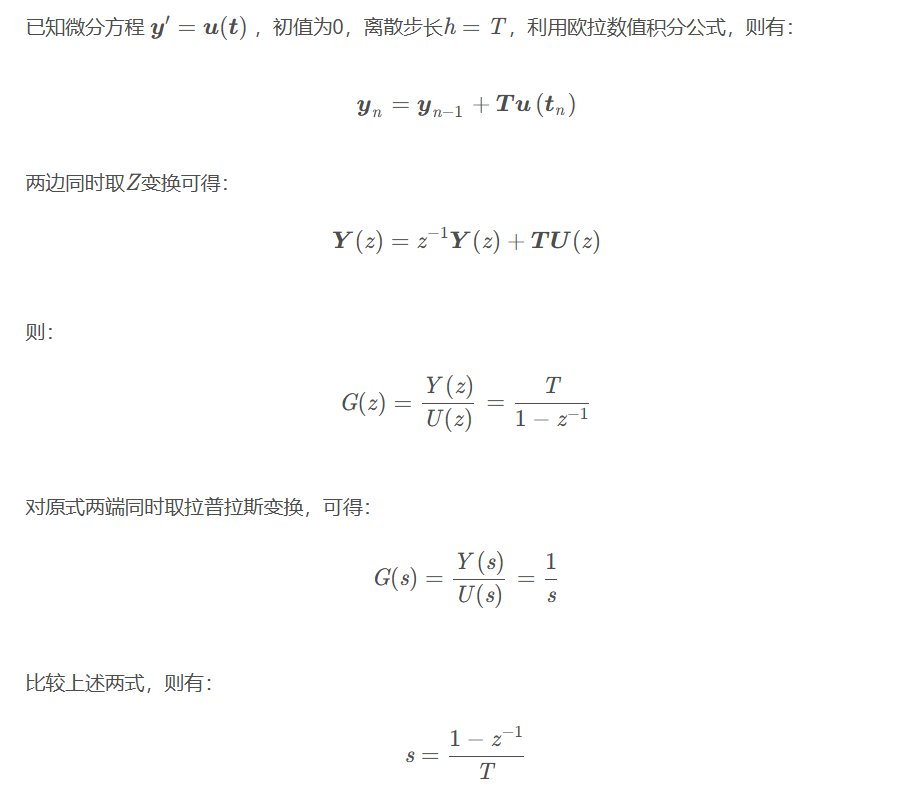
3.3.2 一阶向后差分
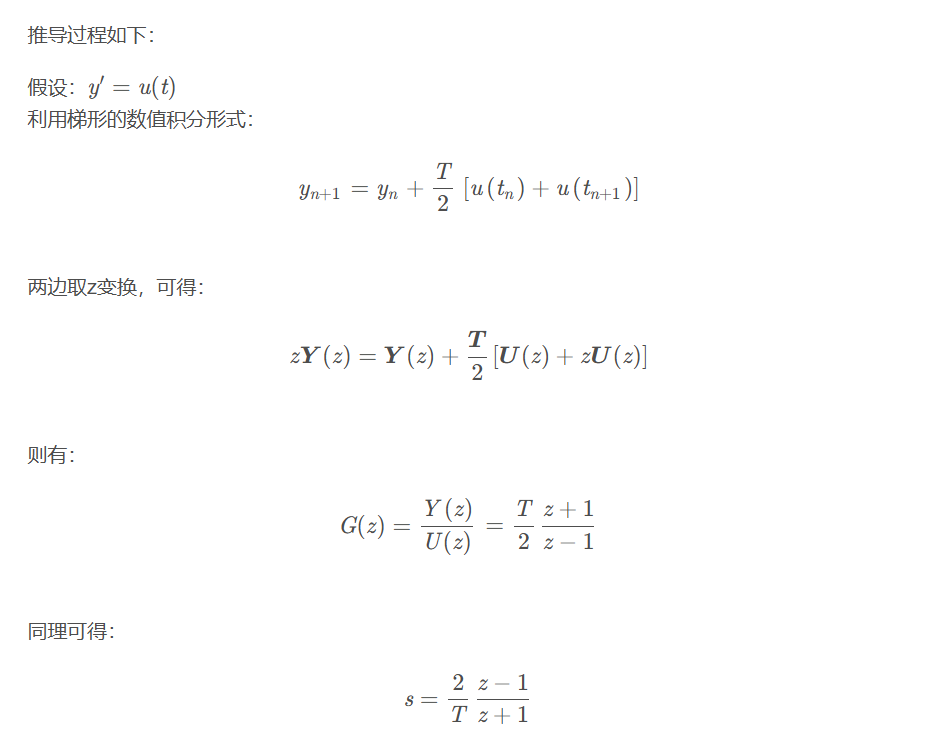
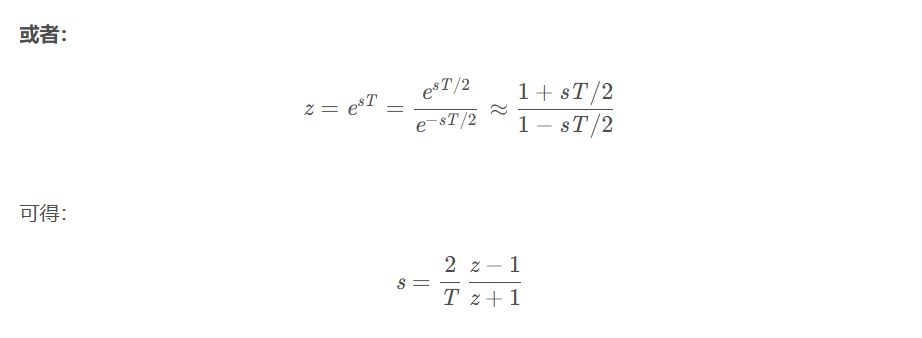
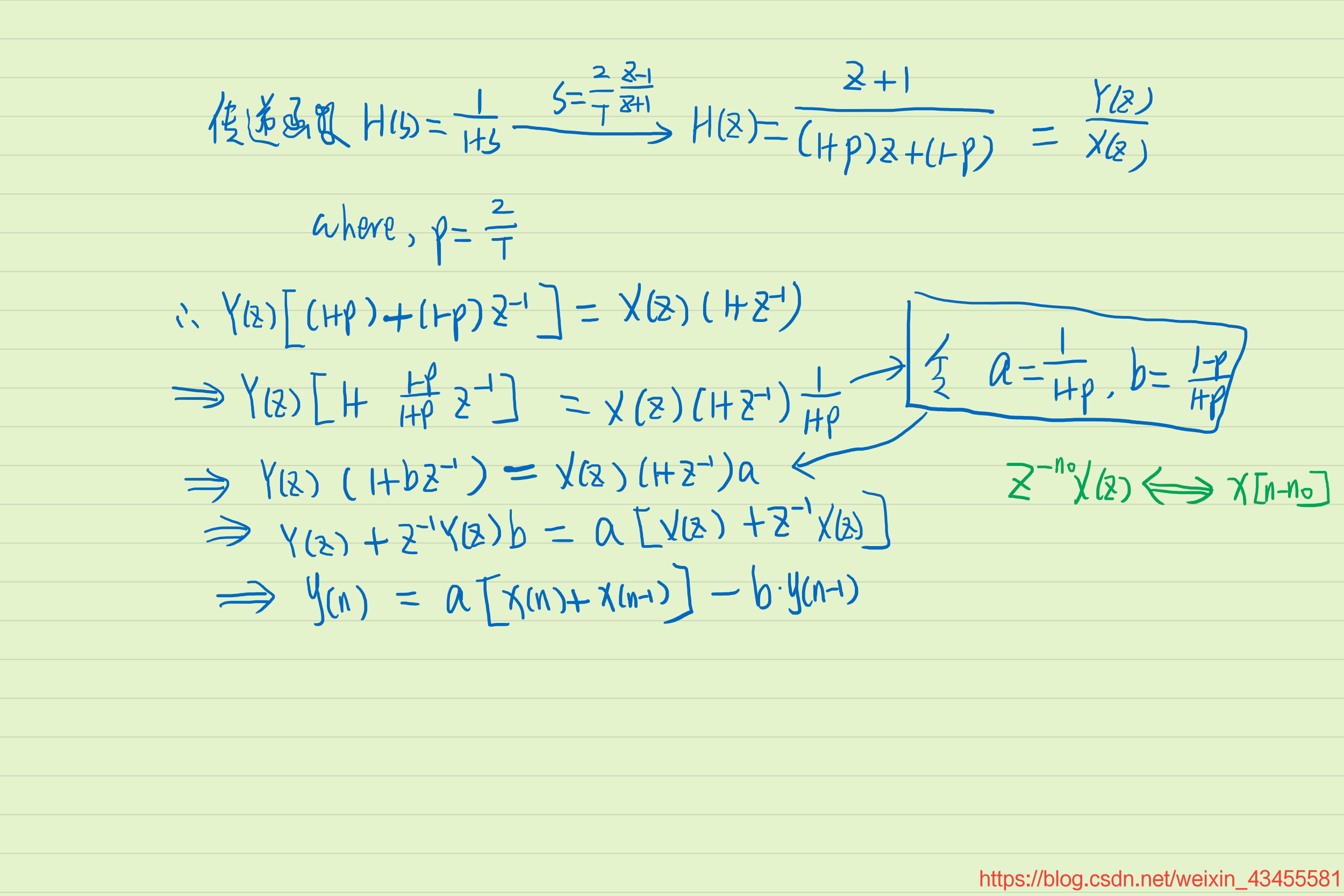
3.3.3 双线性变换
一阶向前、向后差分法的依据是积分的矩形法则,有时效果并不好,故出现了依据积分的梯形法则的双线性变换法(又称塔斯汀法)。
3.3.4 零阶保持器法
3.3.5 一阶保持器法
3.3.6 脉冲响应不变法
至此,将传递函数中的s全部替换,得到传递函数的离散域表示(即差分方程)。我们也可以使用matlab中的c2d函数来对传递函数离散化,调用格式如下。
1 | [numZ denZ]=c2d(num,den,‘tustin’) %bilinear method |
c2d()中第一个参数为s域传递函数,第二个参数为采样间隔时间,第三个参数表示离散的方法。
离散方法包括以下几种方法:
- zoh零阶保持器
- foh一阶保持器
- tustin双线性变换法
- matched零极点匹配法
- impulse脉冲响应不变法
注意:得到的差分方程的表示如下,n必须大于等于m(因为未来时刻的信息无法获知)
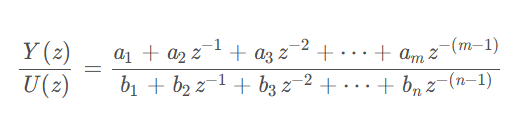
与s域传递函数类似,z呈降幂排列,但是首相幂为0,无正幂项。
式中:

表示前n个采样时刻的信号值。
当从连续域到离散域的离散效果不好时,有如下改进的方法:
- 选取更适合的离散化方法。
- 提高采样频率。
- 修正连续域设计,如增加稳定裕度指标等。
3.4 实例说明
3.4.1 实例一
假设当前我们获得的传递函数模型如下:
采用方法一:将模型中的s用方法一替代。
化简得:


接下来根据以下转化关系:

上式可写成:

到此差分转换结束。其余变换可参考同样方法。
3.4.2 实例二
3.5 Matlab辅助完成
s域的传递函数在matlab中可如此表示:
通过如下方式获得Z变换形式:
分子分母同除以z,获得以下形式:
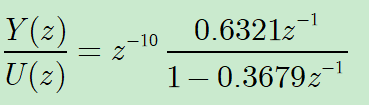
进一步:

其他情况可参考。暂时到这里结束,提醒一下,单片机中采用差分方程切记设置初值,初始化初值。
1 | % 例2 |
3.6 使用不同离散化方法的影响
下面我们首先使用不同离散化方法对传函G(s) = 1/(0.2s+1)进行离散,离散化采样时间Ts=0.05:
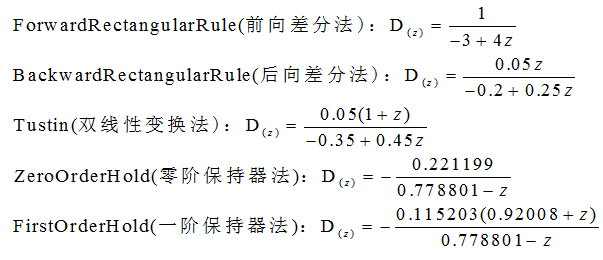
然后对比不同离散化方法后的bode图和未离散化的系统bode图:
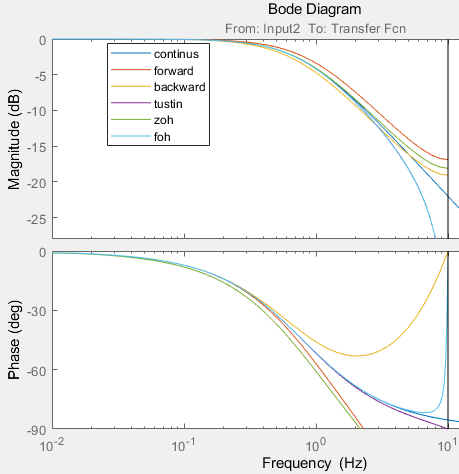
从bode图中可以看出,前向差分法离散化以后偏离实际的系统更远,不能保证系统的稳定性。而后向差分法和双线性变换法,更接近未离散化的bode图,所以后向差分法和双线性变换法在工程中较为常用。
3.6.1 传递函数到单片机实现的例子
假设一个低通滤波器的传函为:
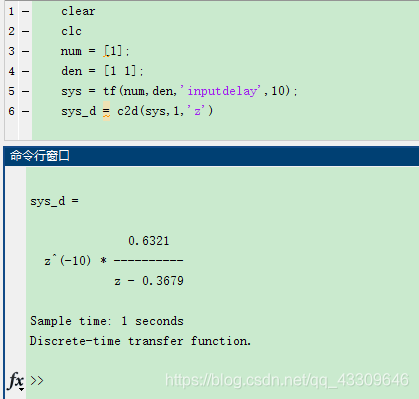
我们先用matlab看一下该传函的特性:
1 | >> num=1; |
看一下它的bode图:
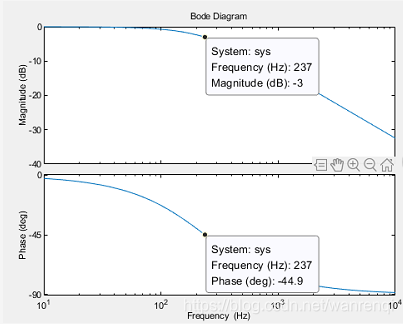
从图中可以看到该低通滤波器截止频率为237Hz,截止频率处相移位45度。
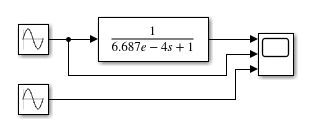
我们也用simulink搭建一个仿真,验证下当该滤波器输入一个237Hz的正弦波时,输出是不是一个为-3dB衰减,且相移45度的正弦波。
波形如下:
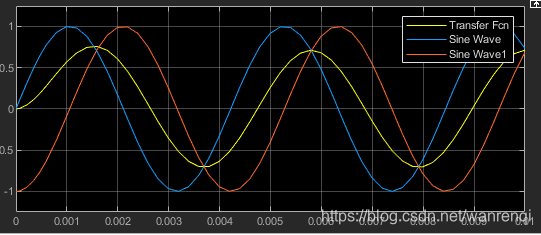
图中sine Wave和sine Wave1两个波形相差90度,而滤波出来的Transfer Fcn波形可以正好相差45度,衰减-3dB。
我们现在用matlab对他进行离散化:
1 | num=1; |
然后我们用simulink再搭建他对应的离散传递函数下的系统特性有没有变化:
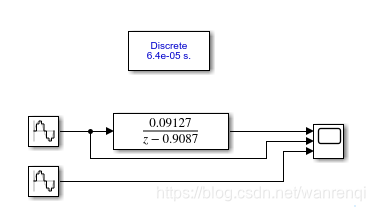
采样时间为ts=64e^-6,波形如下:
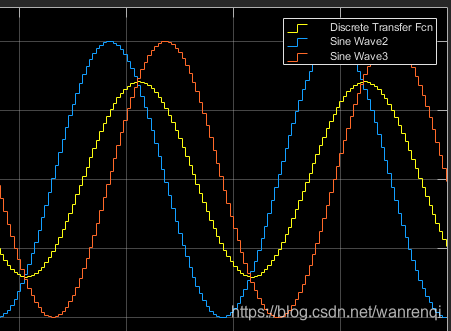
从图中可以看出滤波出来的Discrete Transfer Fcn波形正好相差45度,衰减-3dB,所以它在离散下特性没变。
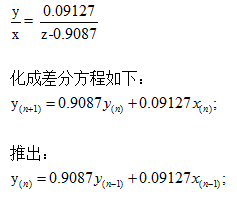
下面将离散域下的函数转化为差分方程:
假设输入为x,输出为y。
转化为上面的差分方程后,就可以在单片机中实现了,我们也可以在simulink中用sfun仿真,看下转化为数字滤波后的特性是否发生变化。同样输入幅值为1,频率为237Hz的正弦波,仿真如下:
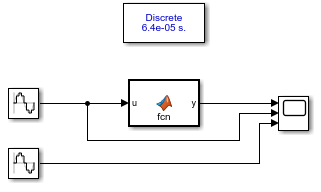
sfun如下:
1 | function y = fcn(u) |
仿真波形如下:
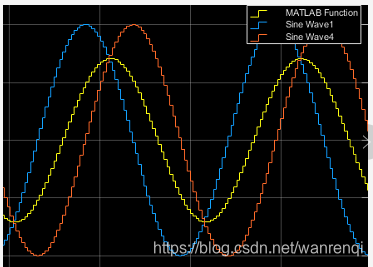
从图中可以看出滤波出来的Matlab Function波形正好相差45度,衰减-3dB。
注意:可能有的人会问,一阶低通滤波器的差分方程的形式不应该是:
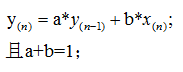
是的,这个是用一阶后项差分法离散后得出的差分方程。
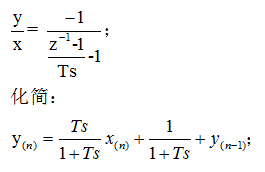
因为没有找到,matlab中传递函数怎么进行一阶后项差分离散(也就是用 s = (1-z^-1) / Ts 替代),其实我们也可以定义符号变量进行替代。
1 | >> syms s z Ts;%定义符号变量 |
化成差分方程的形式:(化简后的公式,第二个+号改为×号)
以上整个就是传递函数的离散化的单片机实现过程了。
3.7 二阶以上传函的离散化(使用状态方程的方式)
传递函数要编程实现,就必须先进行离散化。前面我们介绍了一阶传递函数的离散化,其过程比较简单。那么对于二阶及二阶以上的传递函数怎么离散化呢?我们可以把传递函数转化为状态方程,这样就可以变成多个一阶的传递函数,然后再进行离散化。
传递函数离散化步骤:
- 传递函数转化为状态方程。
- 状态方程离散化。
3.7.1 传递函数转化为状态方程
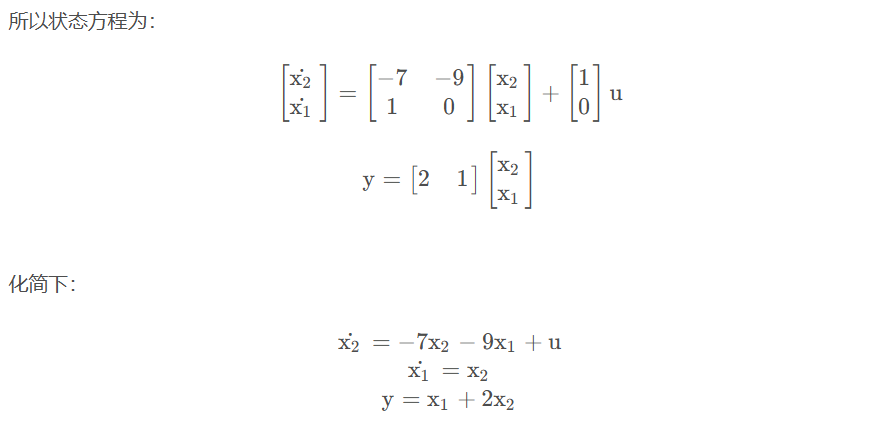
这里我们举一个简单的例子,把下面的传递函数转化为状态方程的形式:
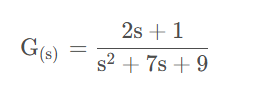
这里我们借助matlab工具求解,代码如下:
1 | >> num=[2 1]; |
3.7.2 状态方程离散化
我们把上面的状态方程离散化,写出matlab function模块仿真如下:
1 | function y = fcn(u,Ts) |
3.7.3 传递函数离散化的仿真验证
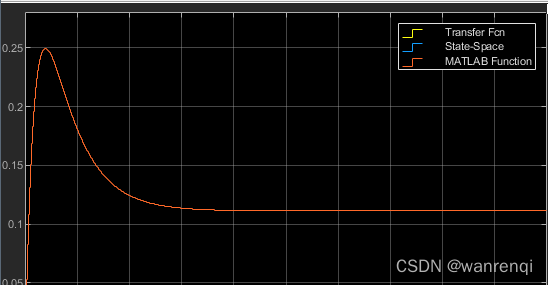
我们把上面例子中的传递函数,状态方程和离散化的代码进行仿真验证下查看其阶跃响应:
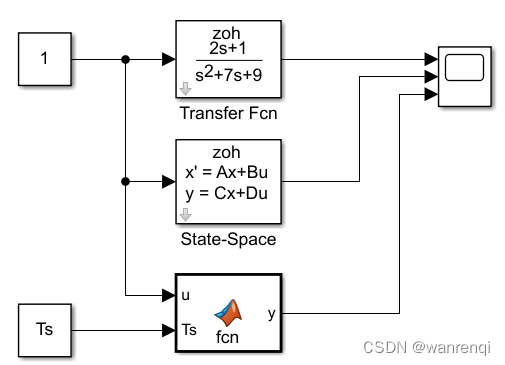
三种方式的阶跃响应结果完全重合如下:
 wechat
wechat- alipay