整流桥及三相PWM整流器原理
整流桥及三相PWM整流器原理
1 整流桥
本文详细介绍了单相整流桥的工作原理,包括其二极管导通原理和工作周期划分。重点讲解了不同滤波条件下输出电压的变化,以及选择整流桥时要考虑的电流和反向电压参数。此外,还提供了整流桥检测的方法,适合电子工程师理解与应用。
1.1 简介
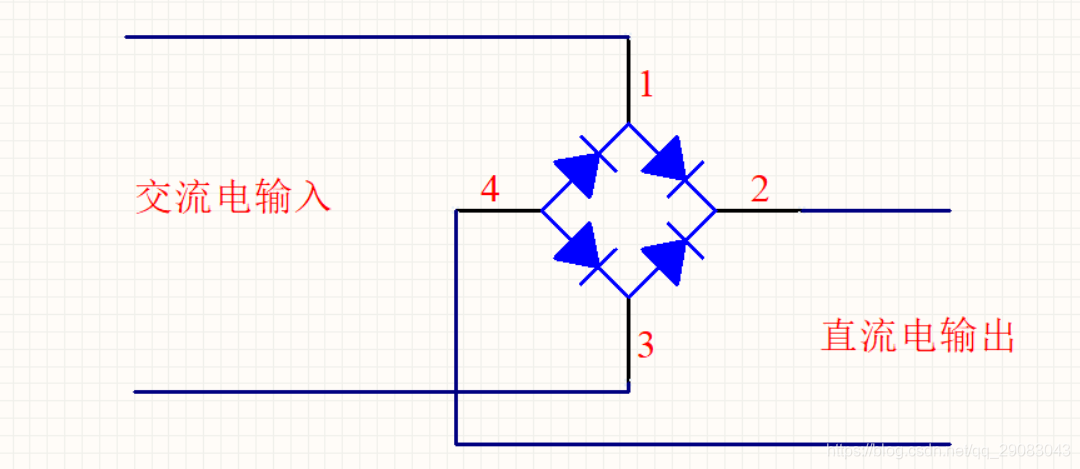
单相整流桥是由四个普通二极管组成的,它可以将交流电转换为直流电。比如市电是220V的交流电,可以通过一个变压器,将220V交流转为15V交流,然后将15V交流接到整流桥上,经过整流桥之后,就变成了21V的直流电。最后再降压,然后供给单片机使用。
1.2 工作原理
通过二极管的 单向导通原理 来完成工作的,通俗的来说二极管它是正向导通和反向截止,也就是说,二极管只允许它的正极进正电和负极进负电。二极管只允许电流单向通过,所以将其接入交流电路时它能使电路中的电流只按单向流动,使负载得到脉冲的直流电。
在整流桥的每个工作周期内,同一时间只有两个二极管进行工作,因此我们可以将整流器工作周期分为正半周期和负半周期。
正半周期时电流通路:
负半周期时电流通路:
滤波电容:
经过整流桥直接整流过的电压还不够平滑,还需要滤波电路电压进行修正。滤波电路作用是尽可能减小脉动的直流电压中的交流成分,保留其直流成分,使输出电压纹波系数降低,波形变得比较平滑,从而获得稳定的电压。
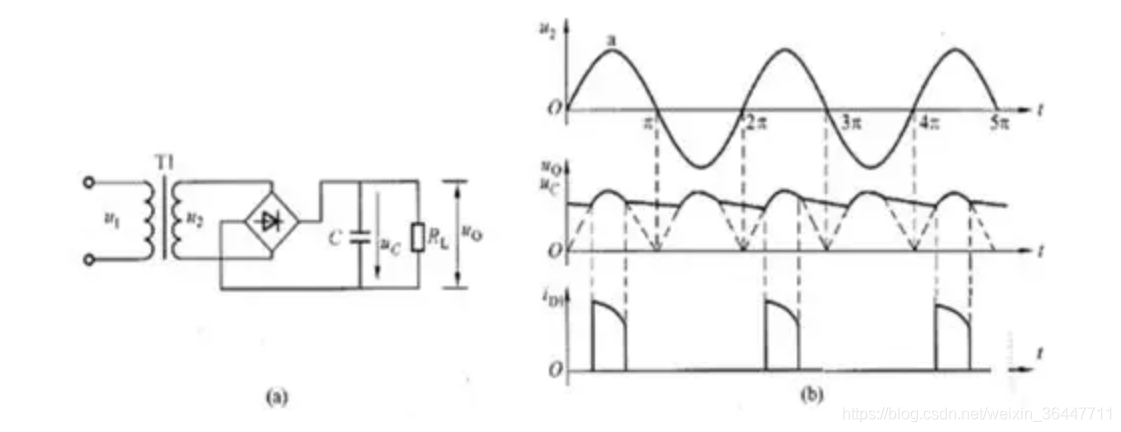
1.3 输出电压值
| 全波整流桥 | V(out) |
|---|---|
| 无滤波电容 | 0.9 * V(AD) |
| 有滤波电容+空载 | √2 * V(AD) 即:1.414 * V(AD) |
| 有滤波电容+负载 | 1.2 * V(AD)这里是倍数的范围值:0.9 * V(AD) < V(out) < √2 * V(AD) |
第一种情况:2和4之间没有接电容,而是直接负载。
输出直流电压 = 输入交流电压的有效值 * 0.9
第二种情况:2和4之间接了电容(一般是极性电容,用作储能),然后再接负载。
输出直流电压 = 输入交流电压的有效值 * 1.414
这个电压在波动,一般在0.9~1.4倍之间浮动。
1.4 选择整流桥模块要考虑的参数
能流过的最大电流
在一个工作周期(2Π时间内)中,因为只有两个二极管导通,
所以流过的最大电流只要为负载电流的一半就可以了。比如负载需要的电流为10mA,那么二极管能流过的最大电流要在5mA以上比较合适。最大反向电压
为负载(电容)两端电压的2.8倍左右。
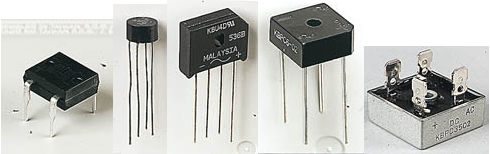
封装和数据手册
有斜角一端的是直流电的正极,中间的两个是交流电的接线端子,交流电没有正负极。

下图中,1指的是最大反向电压。2指的是有效电压。
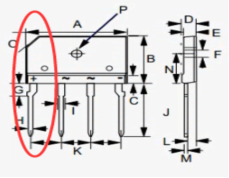
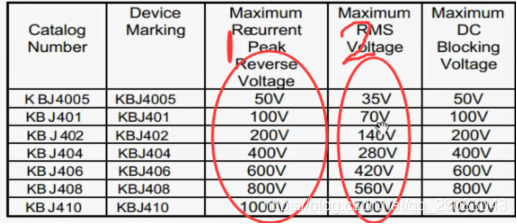
因为整流桥中的二极管流过的是一个交流电,所以二极管两端的电压是在波动的,这时使用一个直流电的电压来等效它。在相同时间内,经过同一个电阻发出相同功率,就将该直流电压等效为交流电压,我们就把这个直流电压称为该交流电的有效值。
常用的全桥整流电路是KBJ4005、KBJ402等,KBJ40X含义:40表示最大的电流为4A。
1.5 整流桥的检测
电阻测试
电阻测试法是利用二极管的单向导通特性,测试其正向有电阻读值与反向截止无读值来判断其是否好坏。
压降测试
压降测试法是利用万用表二极管党委直接测试整流桥内部二极管芯片的方法,读值为压降的参考值或近似值。
测整流桥电桥各脚的极性
万用表置R ✖ 1k挡,黑表笔接桥堆的任意引脚,红表笔先后测其余三只脚,如果读数均为无穷大,则黑表笔所接为桥堆的输出正极,如果读数为4~10kΩ,则黑表笔所接引脚为桥堆的输出负极,其余的两引脚为桥堆的交流输入端。
2 三相PWM整流器
2.1 三相PWM整流器的基本构成
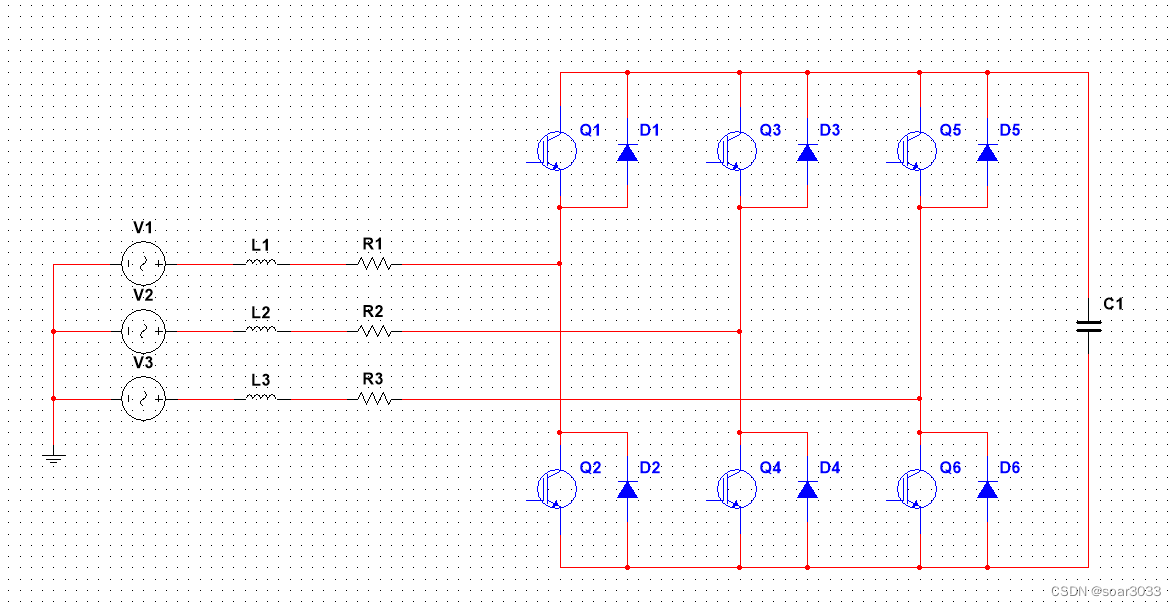
首先贴出三相PWM整流器的电路简图如下,其中V1、V2、V3是三相电源,对应实际的三相电。L1、L2、L3是整流器前端的三相电抗器。R1、R2、R3其实可以看作是三路线路上总的电阻(电缆的电阻、电抗器的电阻等等)。Q1-6、D1-6则构成三相IGBT桥,它也是我们需要控制的核心,最后的C1是直流母线的滤波电容。
2.2 三相PWM整流器的电压控制逻辑分析
PWM整流的原理在网上已经有太多的解释了。但是往往都比较复杂,我们不妨以最简单的逻辑去解释(结合下图,为了简便分析,我们只看其中的一相电路,其中假设U1>0)。
现在我们列出下图电压的等式,显然有U1=UL1+UR1+Ua。
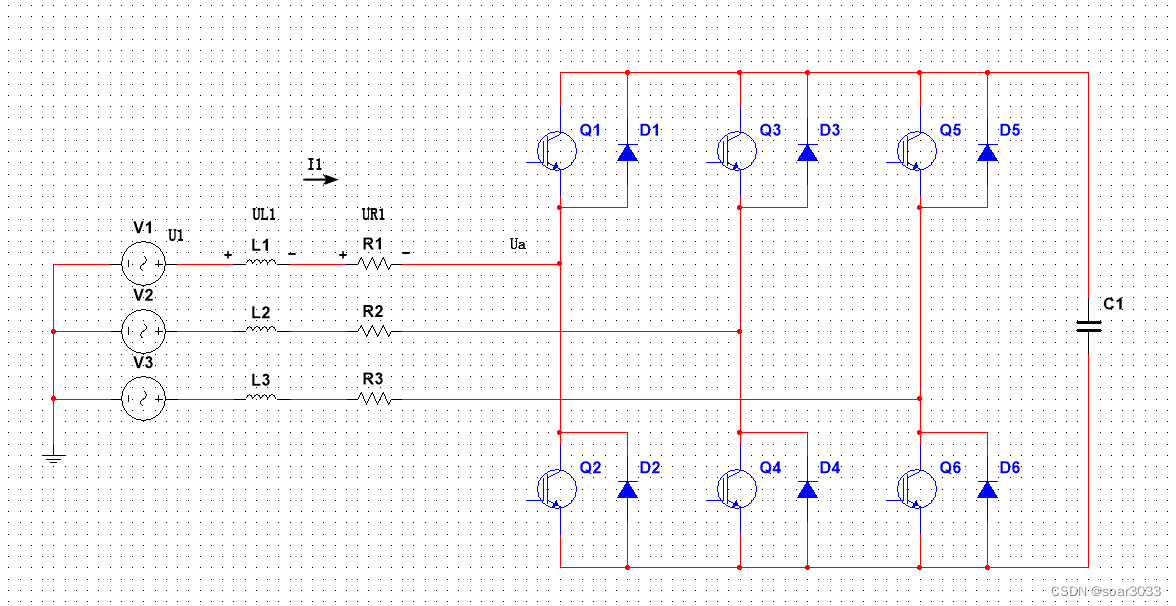
一般的,UL1是比较小的,假设电感为1mH,I1为10A,这时UL1=2 * pi * f * L * I = 2 * 3.14 * 50 * 0.001 * 10 = 3.14V。相较直流母线几百伏的电压,电网几百伏的电压来说,UL1是很小的。如果在设计模型时忽略它只会造成很小的误差,所以我们忽略UL1的存在。这样一来电压的等式就变成了U1=UR1+Ua。
而在实际控制时,我们并非按照每相进行解算,而是像控制PMSM一样把电压和电流都分解到DQ轴再进行解算。此时,电压等式就变成了Ed=URd+Ud、Eq=URq+Uq。其中E是电网电压,UR是电阻电压,U是IGBT桥逆变出的电压。
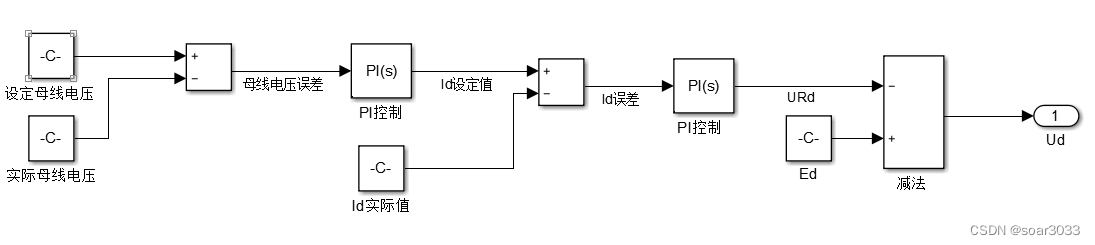
当直流母线电压降低低于设定的母线电压时,我们希望电网对我们的母线进行充电,也就是希望Id>0,并且母线电压低的越多Id就应该越大。而要Id增大,显然就需要R两端的电压URd增大。而根据公式Ed=URd+Ud,我们像让URd增大可以通过控制IGBT桥的逆变,使Ud减小。
上述的逻辑可以归纳为:(直流母线电压设定值-Udc)减小——>Id增大——>URd增大——>Ud=Ed-URd减小。根据这个逻辑,我们可以搭建出一个控制流程图如下。
同理也可以将Uq的控制逻辑做出下图。
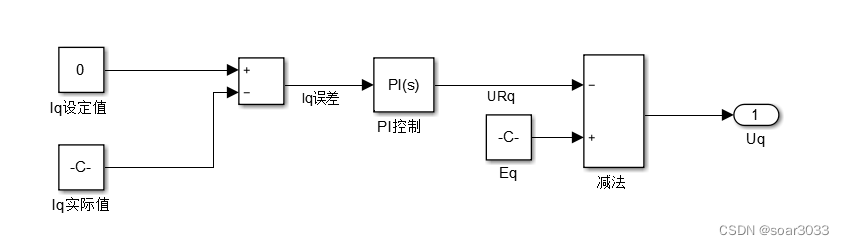
这就是PWM整流的核心逻辑,有了核心逻辑,我们只需要将Id、Iq、Ed、Eq、实际母线电压测量出来输入到控制逻辑,然后使用计算出的Ud、Uq对IGBT桥进行对应的开关控制就可以了。
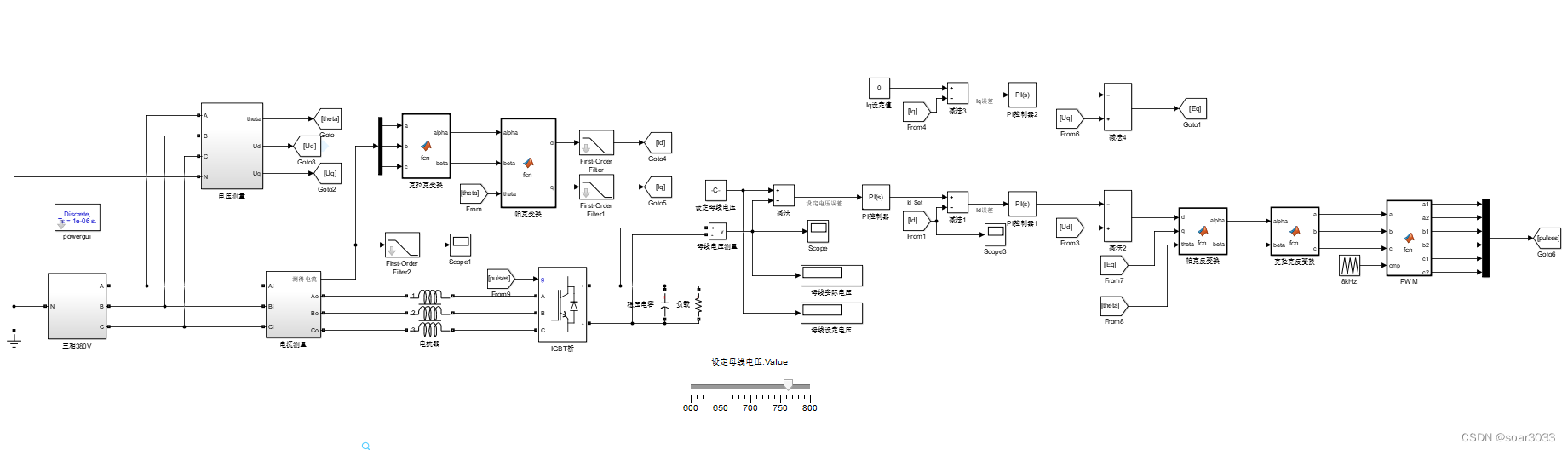
2.3 三相PWM整流器的模型及运行效果
将整个模型搭建完备后的Simulink模型如下图。
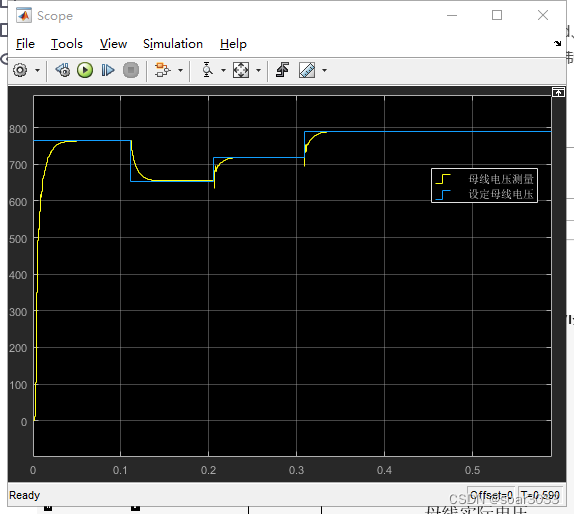
我们试着运行模型,可以看到母线电压在0.1秒的时间内就已经和设定的母线电压非常接近了。
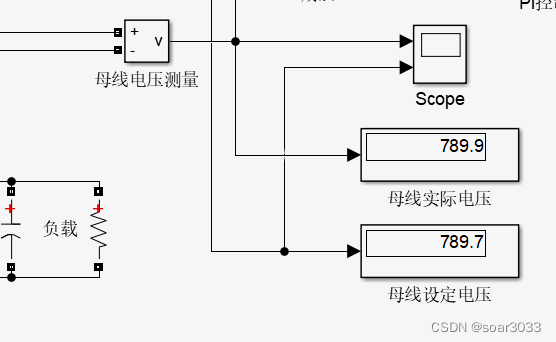
我们继续尝试不断更改设定的母线电压,可以发现,每次更改母线电压的设定值后,模型都可以调整直流母线电压变为新设定的电压值。可见我们的模型达到了设计目的。
2.4 三相PWM整流器与伺服三环控制相结合
然后我们将PWM整流与之前文章中的伺服三环控制模型相结合,并实际运行测试。可以发现在伺服驱动电机进行运行的时候母线电压基本保持稳定。
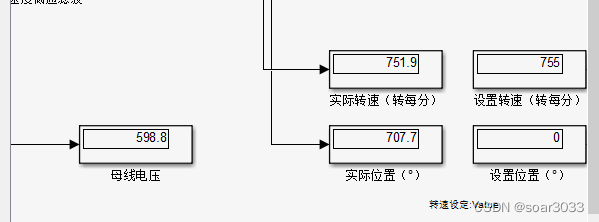
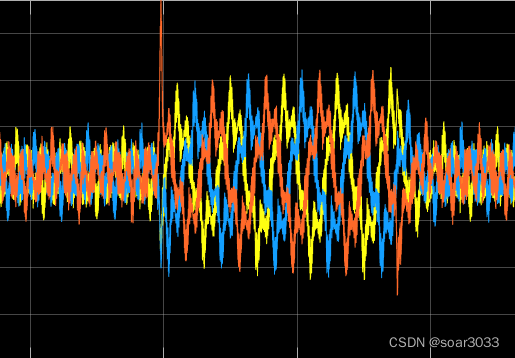
而对整流器的三相输入电流进行监控我们可以看出,在电机进行加速的过程中三相输入电流变大了。而当电机速度稳定后输入电流又变小了,完全符合预期。
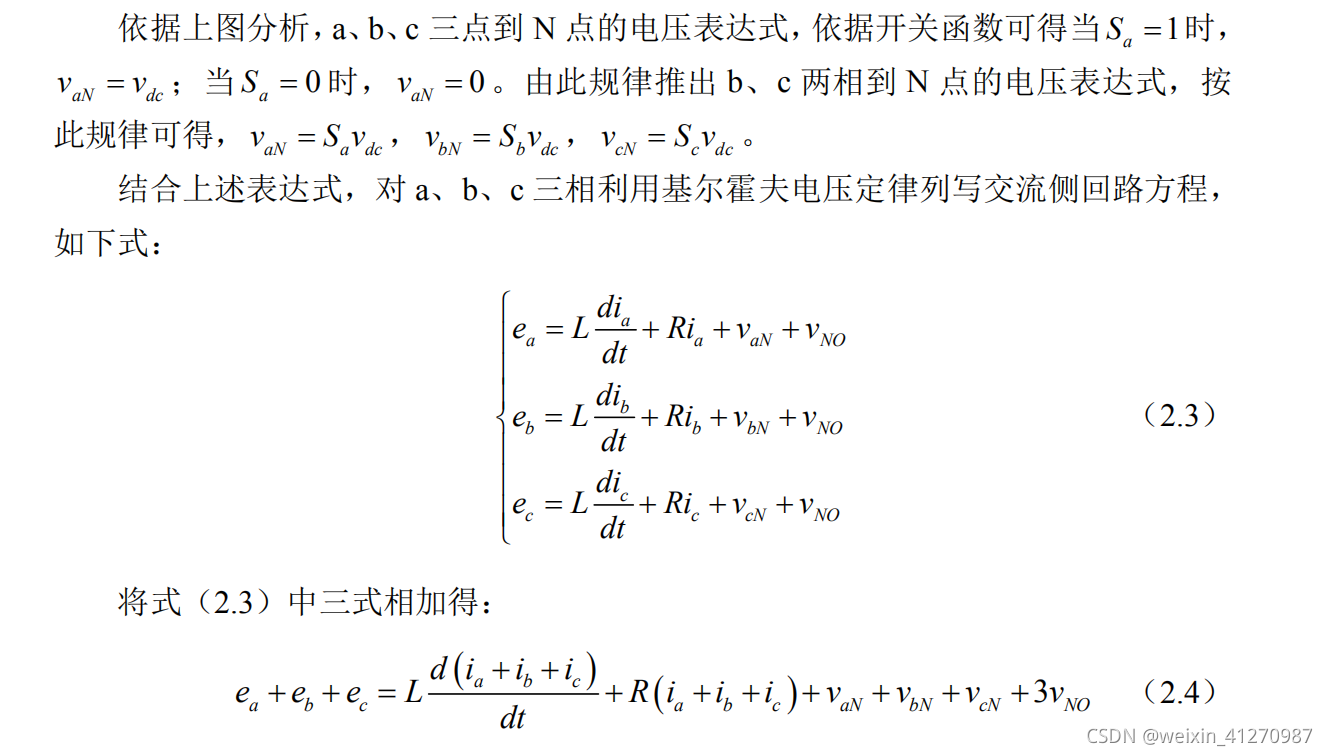
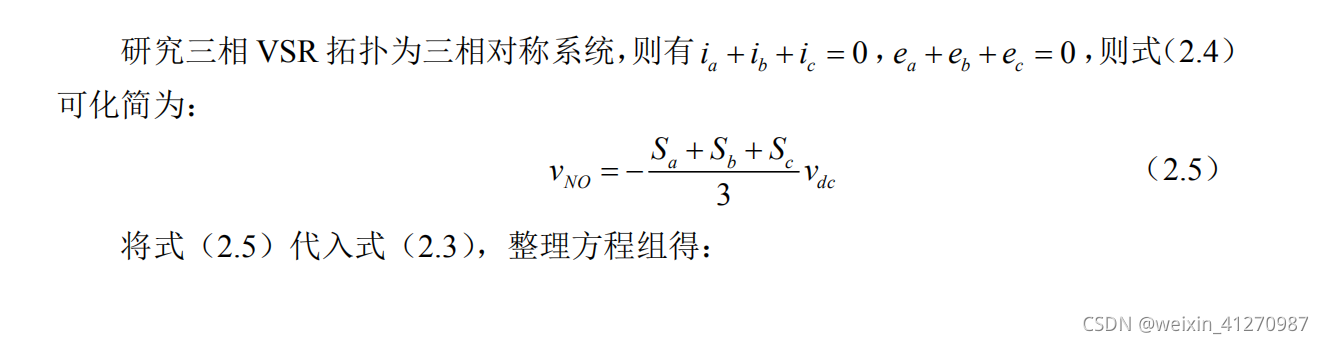
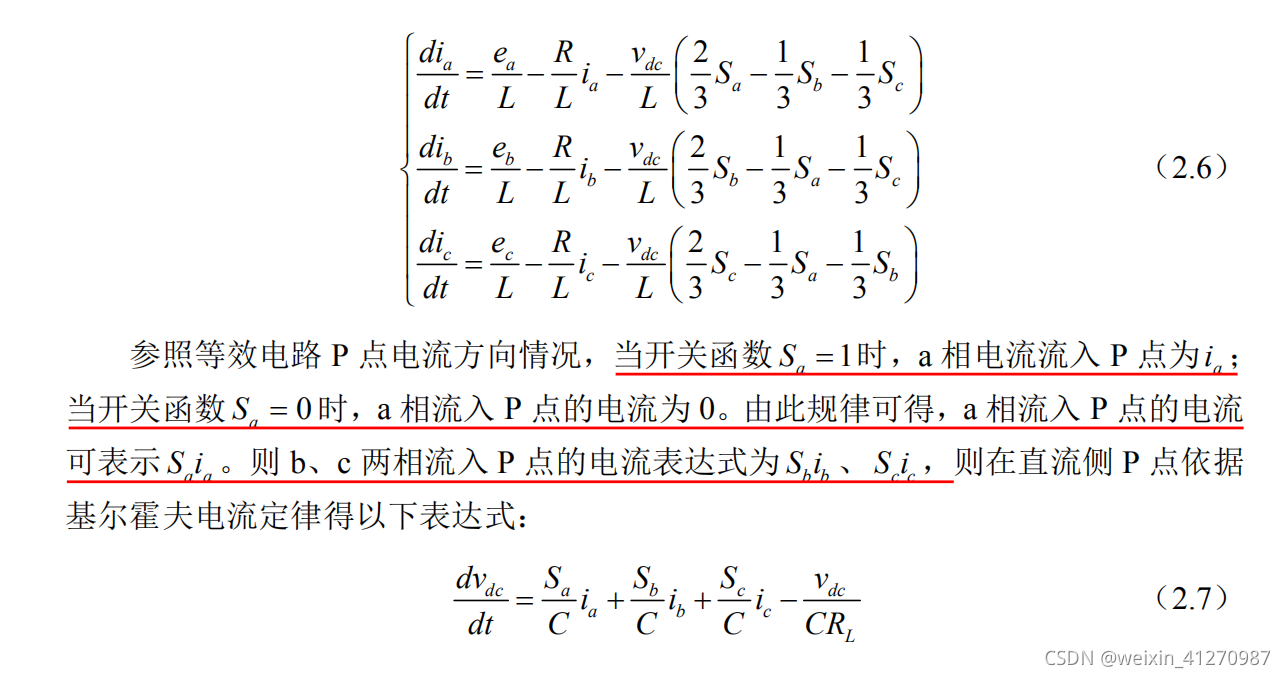
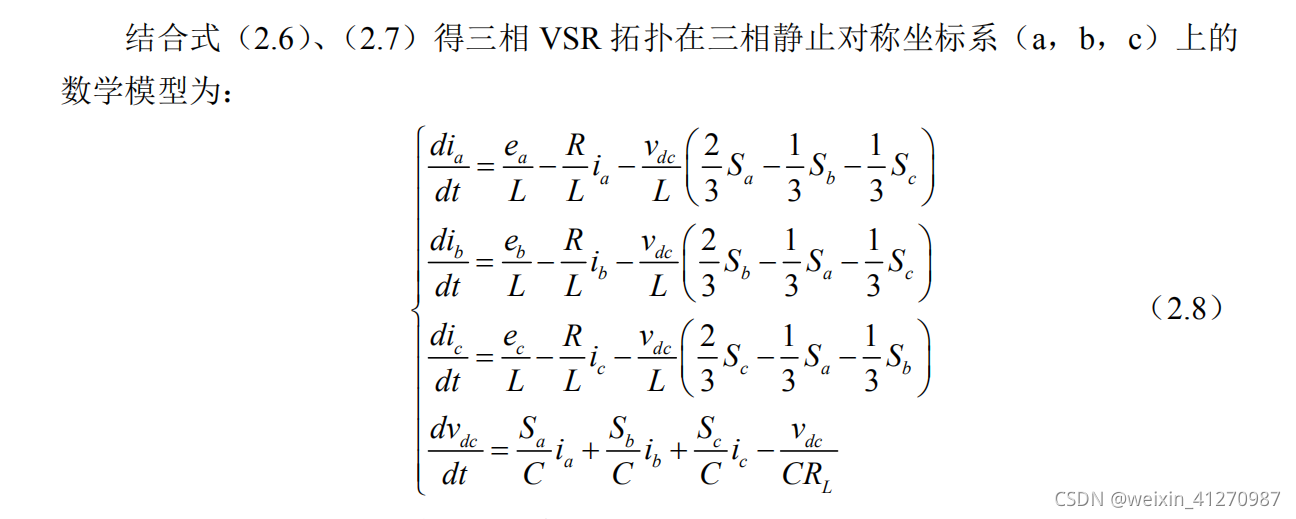
3 三相PWM整流器公式推导
3.1 三相PWM整流器拓扑结构
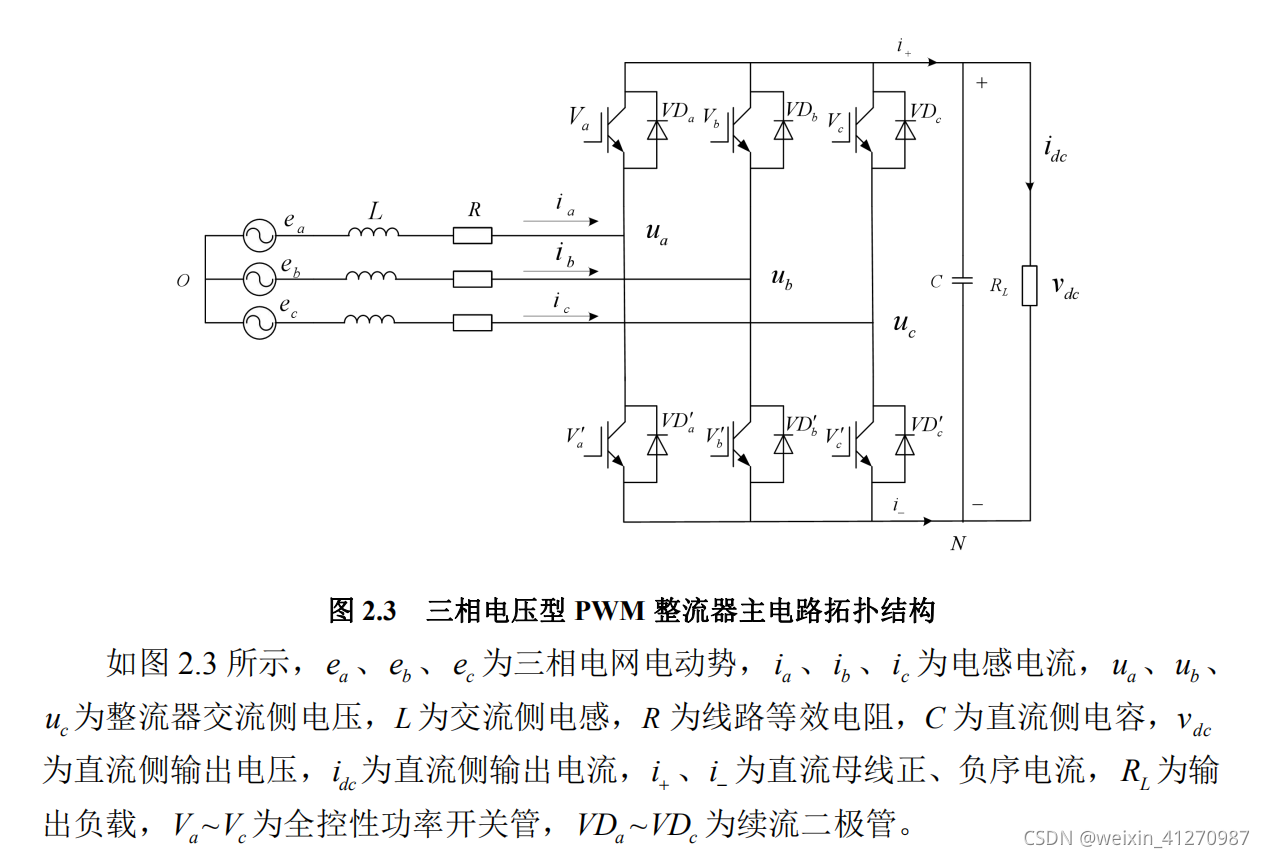
补充:三相VSR中,交流测电感的设计尤为重要,起到升压和滤除谐波作用。桥式功率开关管连接网侧和直流侧,通过对开关管的控制实现能量流动方向控制。并联的二极管在开关管关断时,起到续流的作用。直流侧的储能电容是电压型PWM整流器的标志,直流侧电容不仅可以滤除输出电压纹波,稳定输出电压,还可以滤除因为直流母线电压PWM调制作用,在网侧电流中产生的谐波。该三部分器件的选型将直接决定三相VSR系统稳定性和动态响应速度。
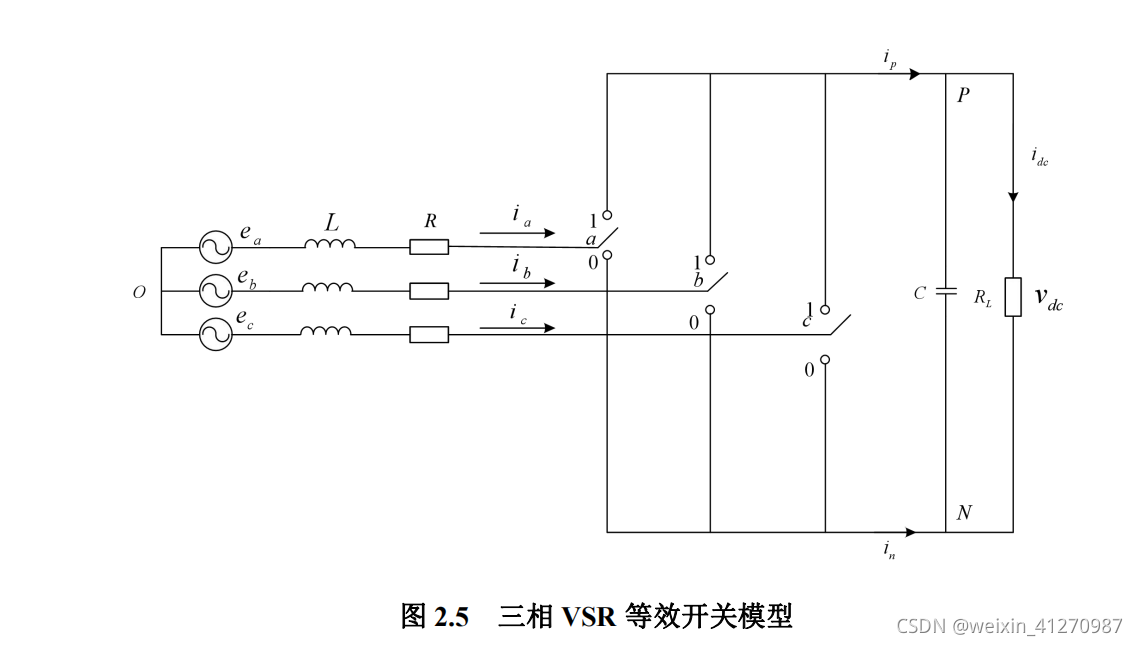
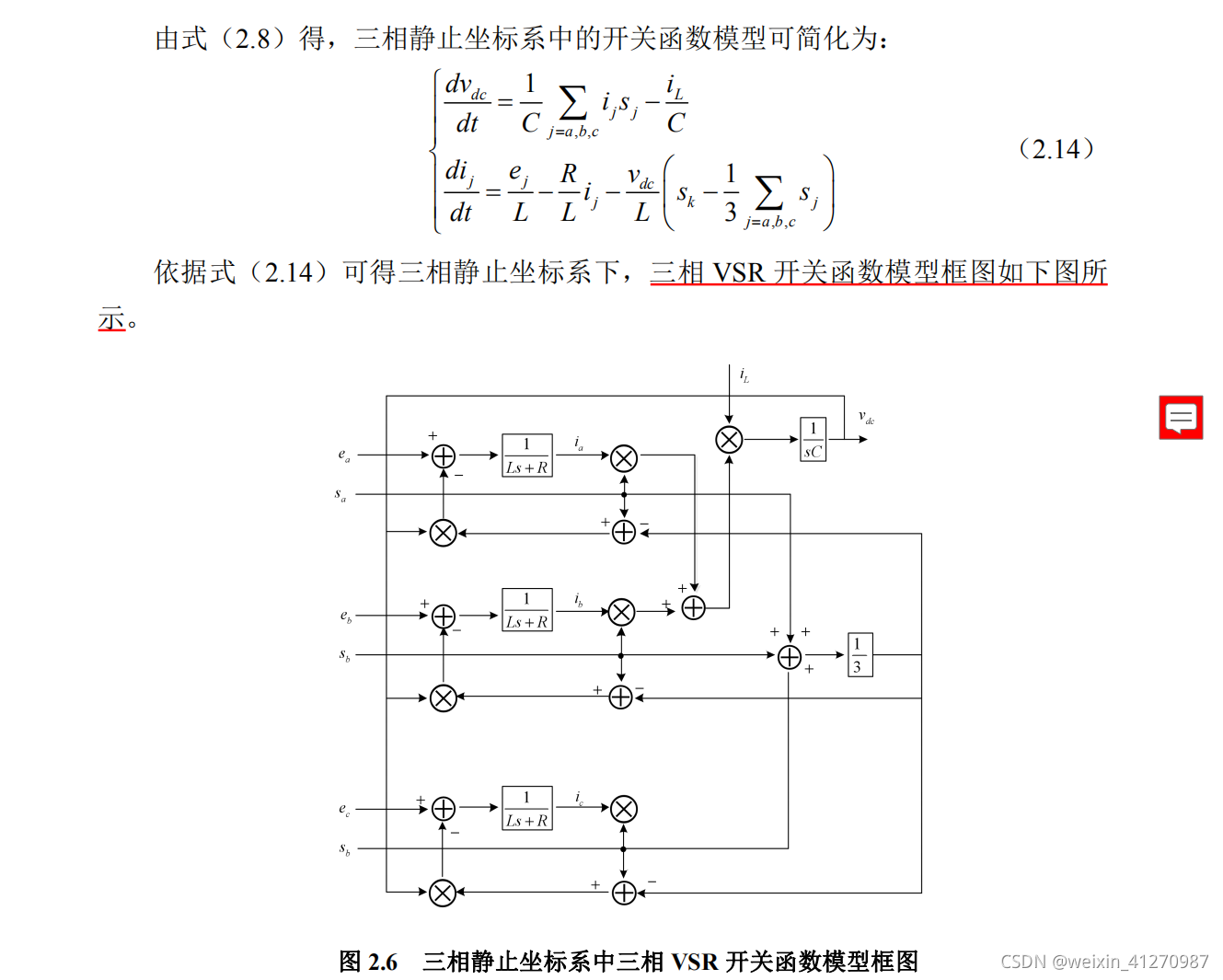
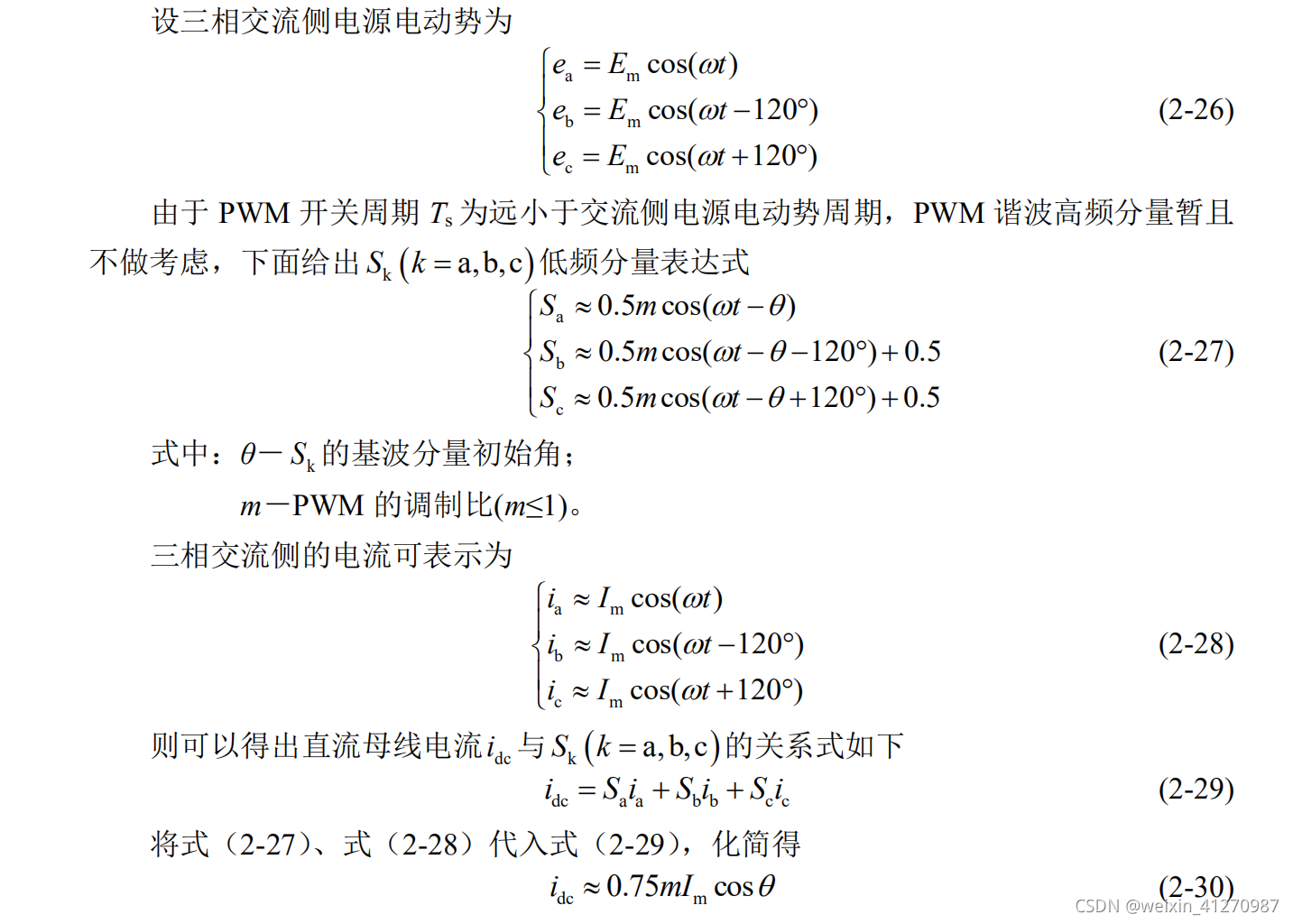
3.2 开关函数一般数学模型
三相PWM整流器等效开关模型:
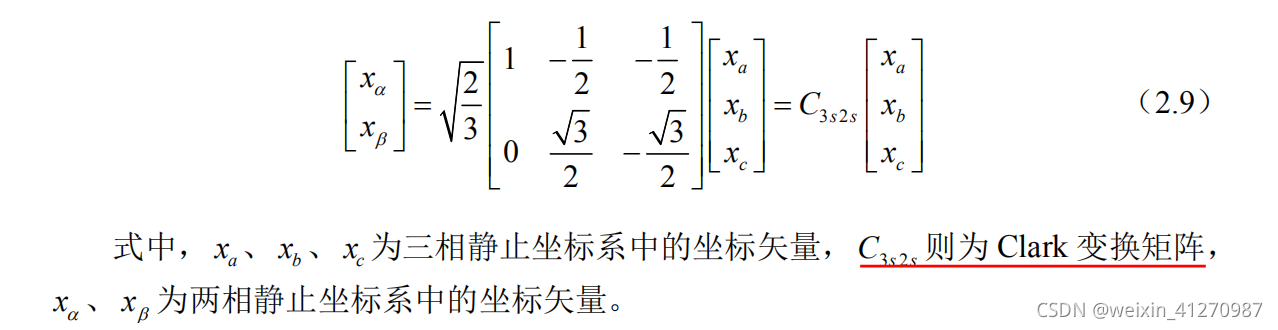
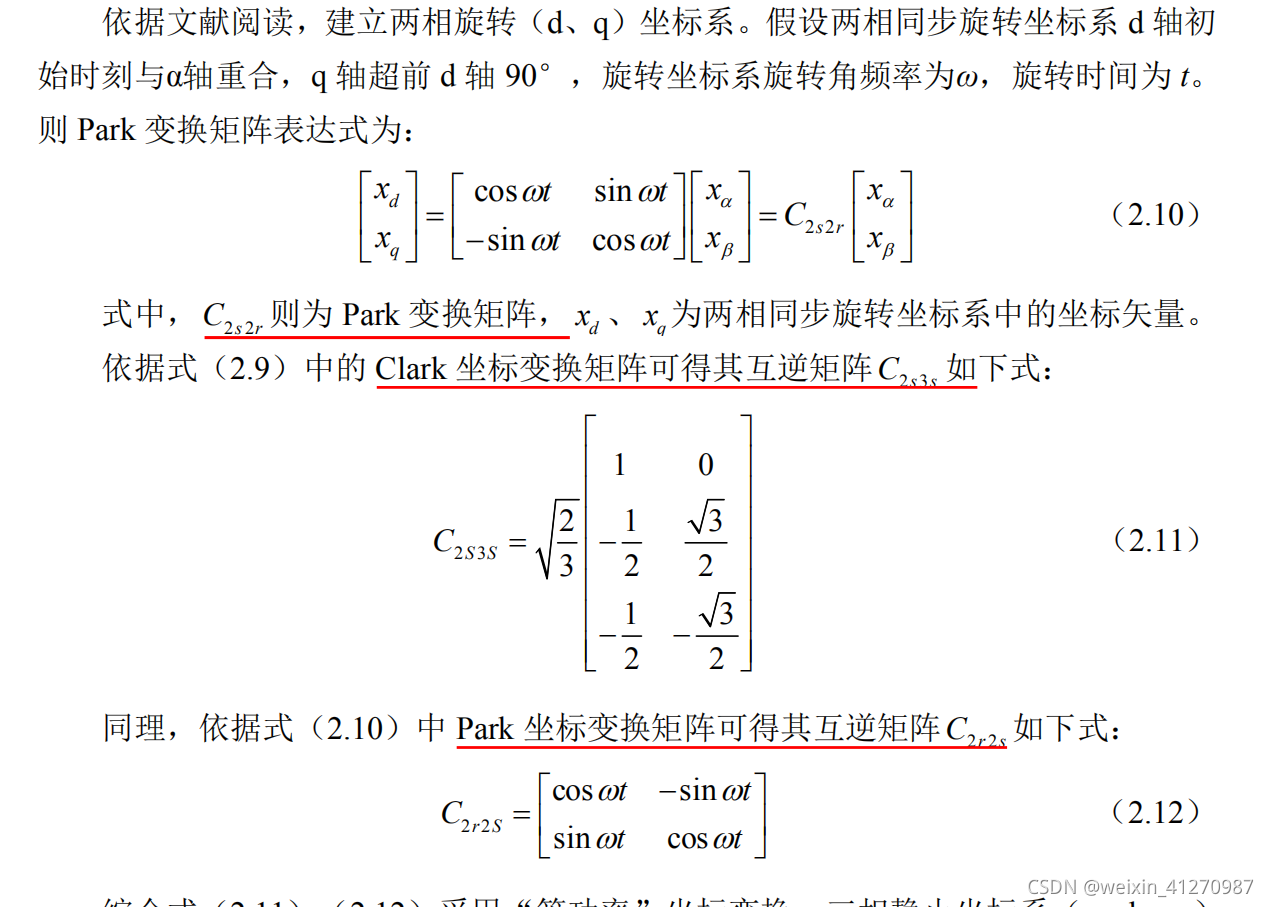
3.3 坐标变换

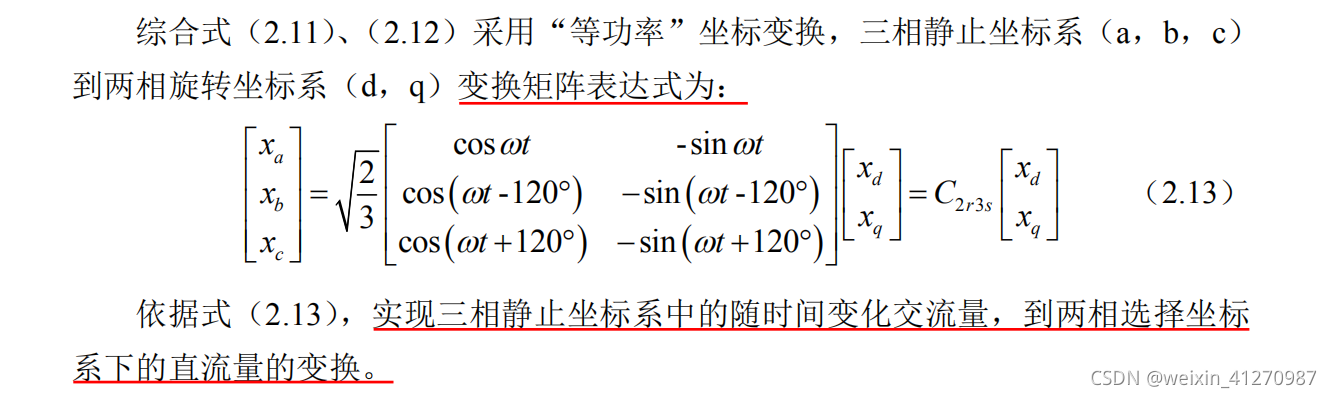

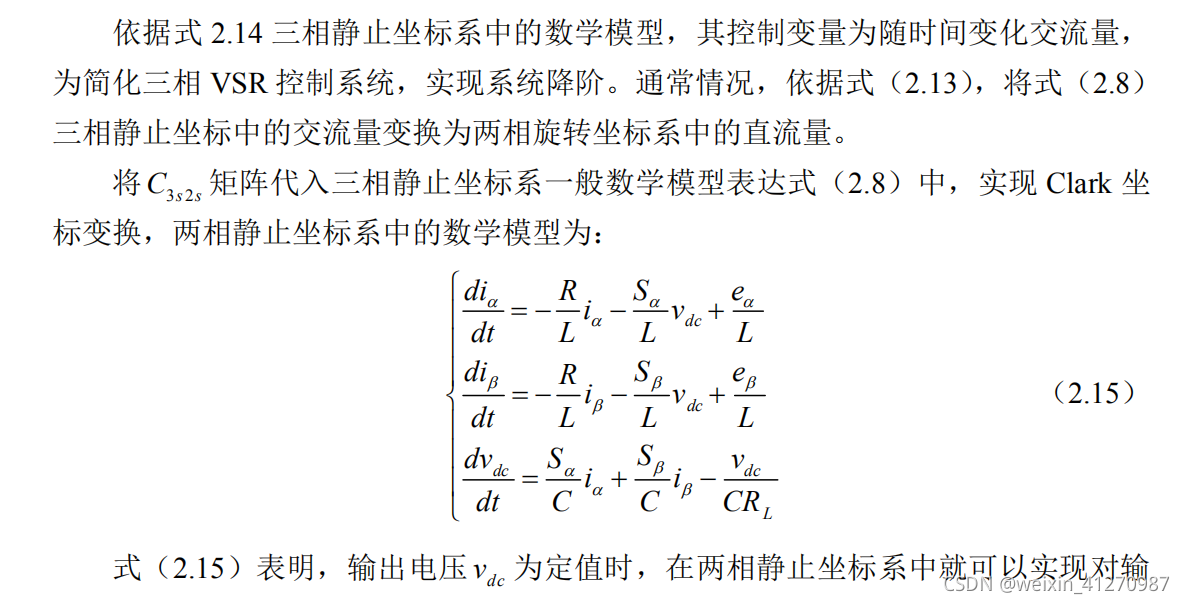
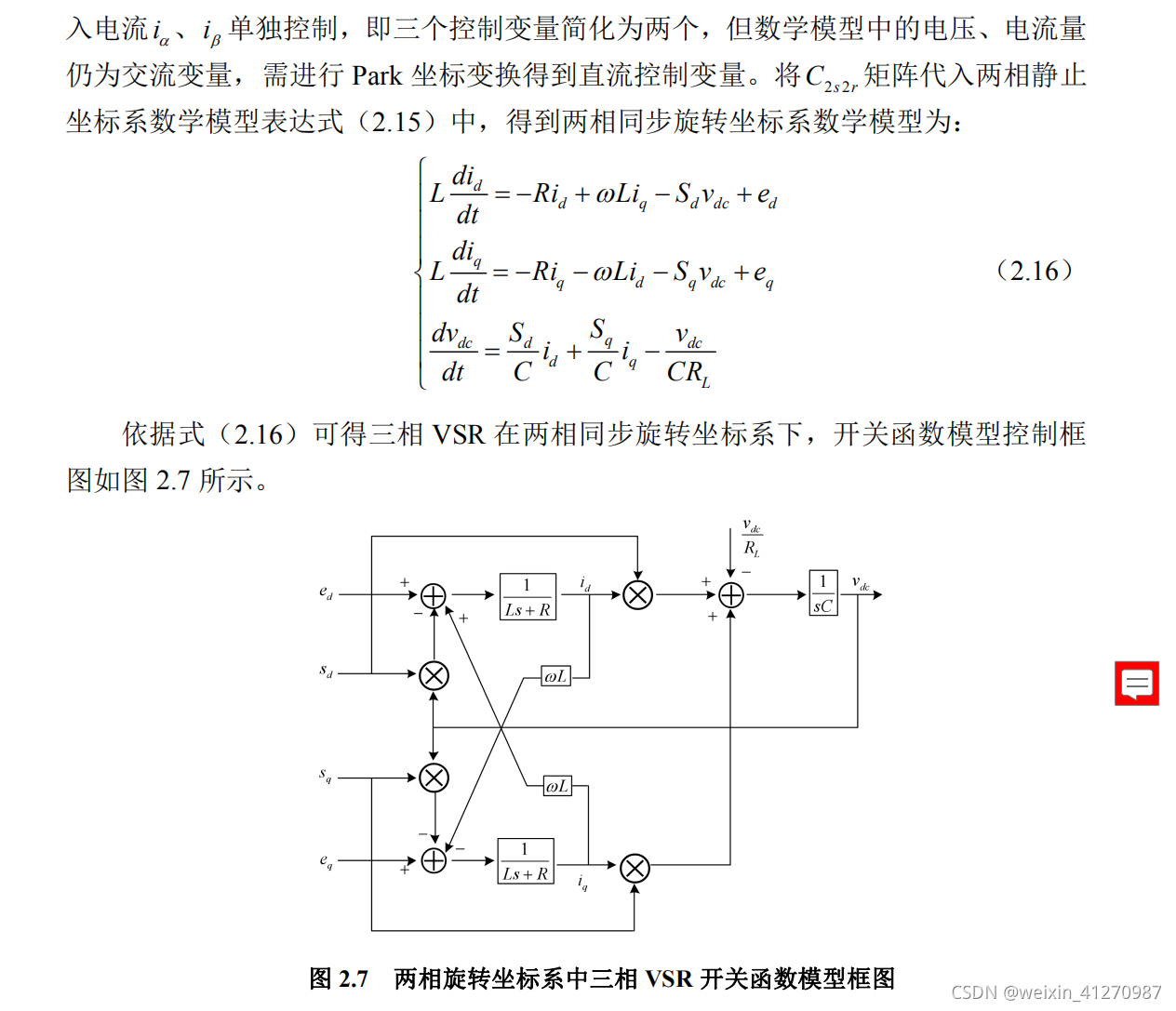
由式2.16依据坐标变换,实现了三相坐标系交流控制变量到两相坐标系直流控制变量的变换,有利于控制系统设计。下一章节,通过电流前馈解耦控制策略,实现交流侧电流有功、无功分量的单独控制。
注意:
- 在坐标变换的过程中,唯一不变的就是电网角度wt始终没有变,Park变换中的dq轴坐标是按照角速度w旋转,其中w就是输入电压角速度w。
- 所以可以通过所向将角度用在坐标变换的整个过程当中。
- 具体变换在软件中已有提醒,可见下文锁相公式中。
3.4 电流内环数学公式推导
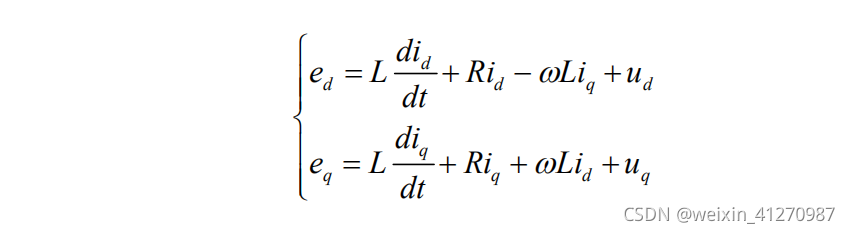
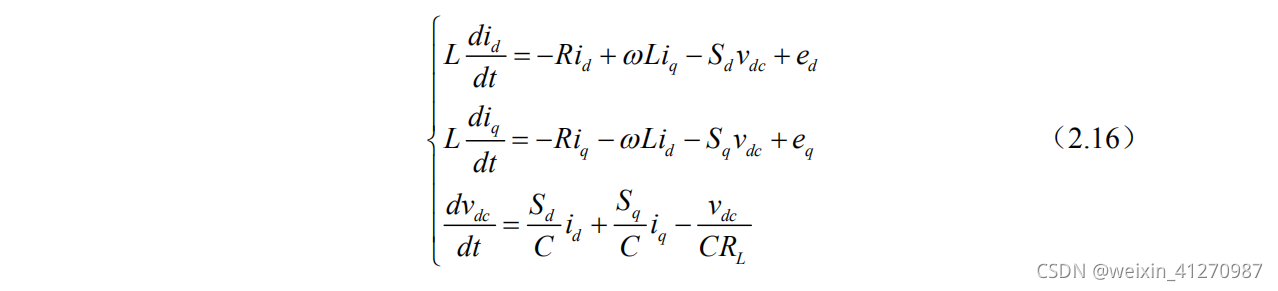
在dq坐标系下,其数学模型可以描述如下:

将其化简可以推导出下面的公式:
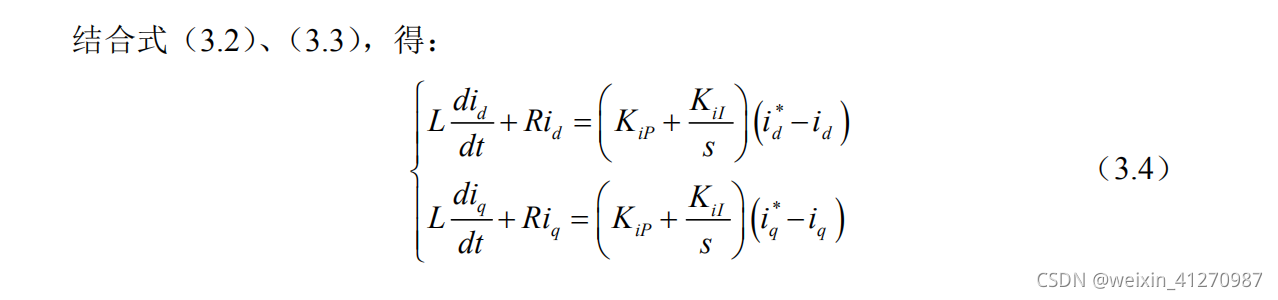
由上述公式可以看出,电流内环可以输出电压参考值。Ualp和Ubelta。
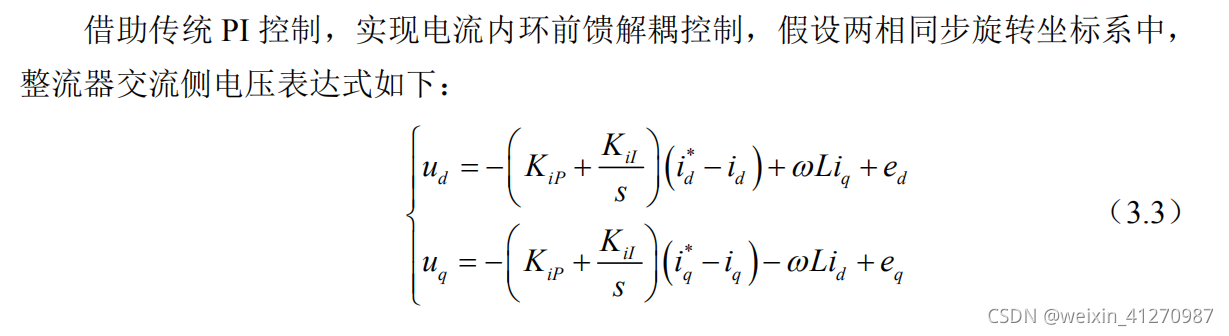
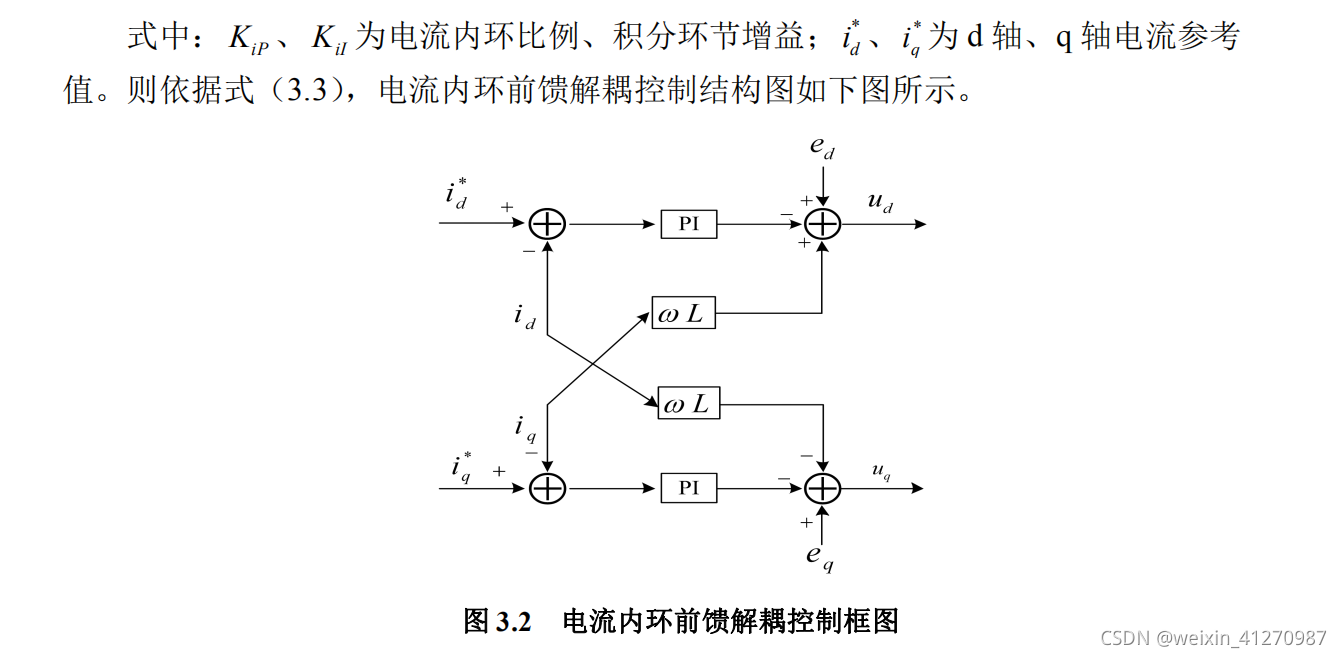
3.5 电流解耦控制(pi控制)

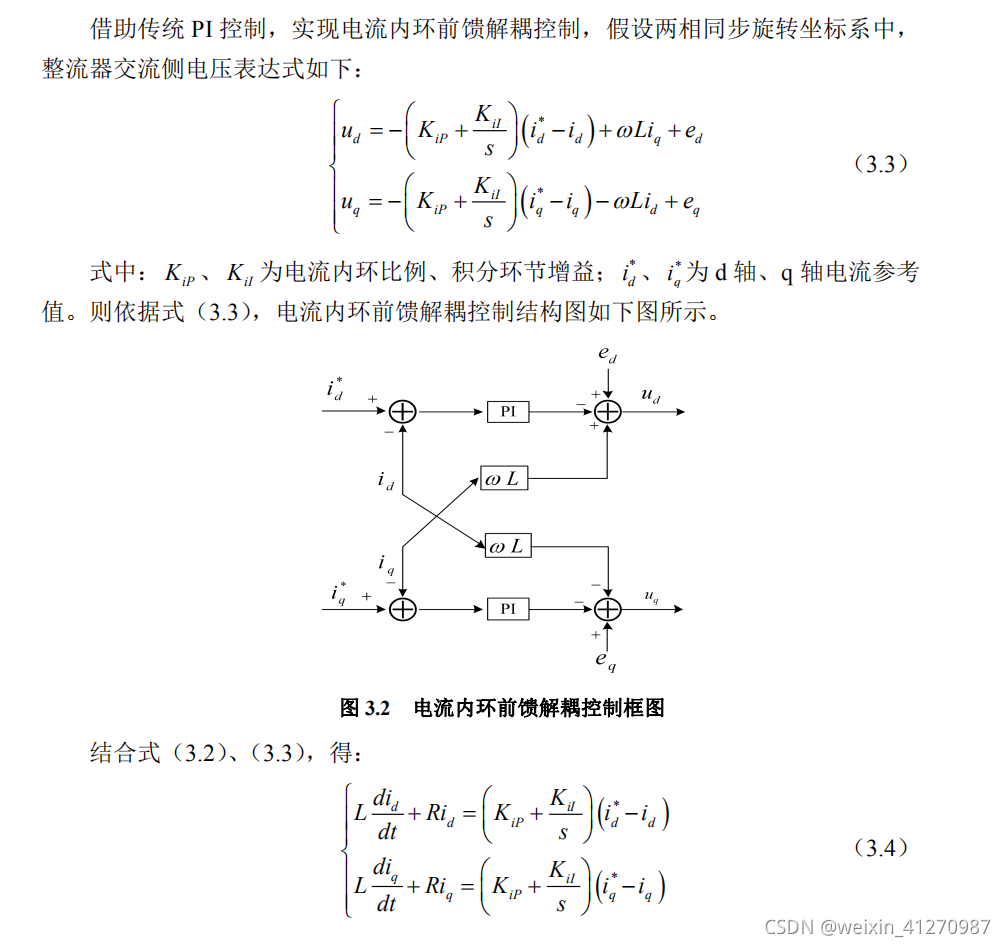
3.6 电压外环数学公式推导
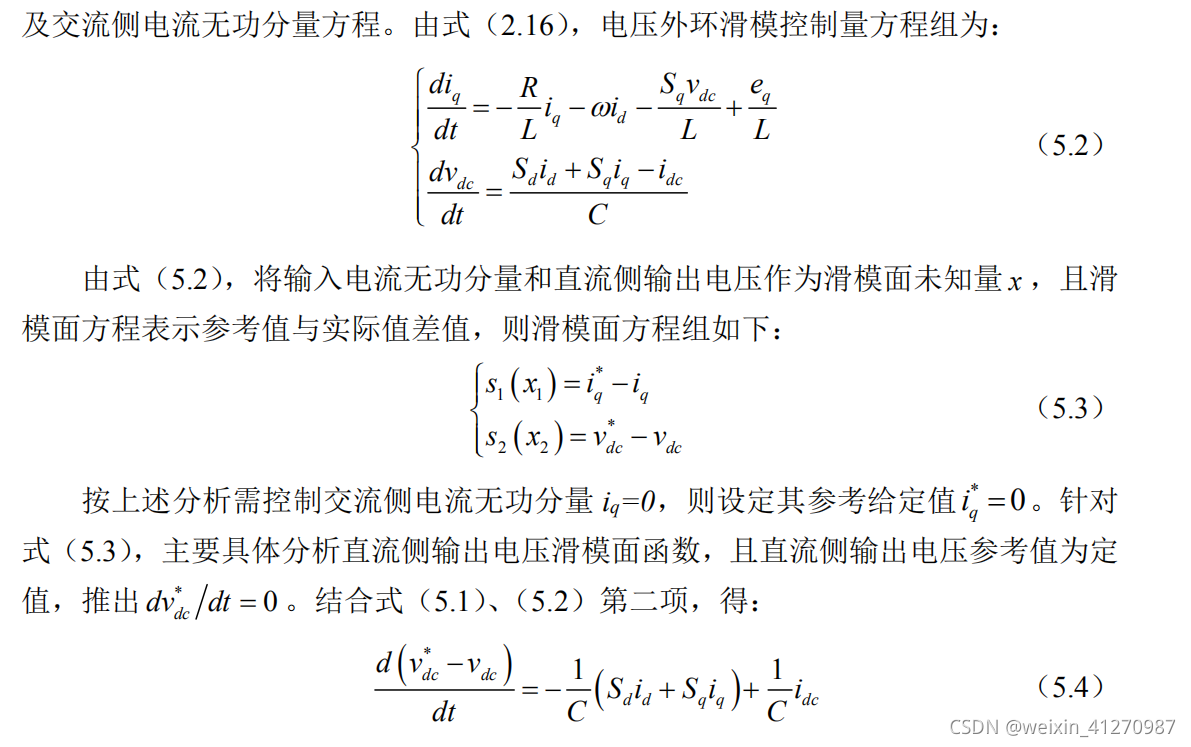
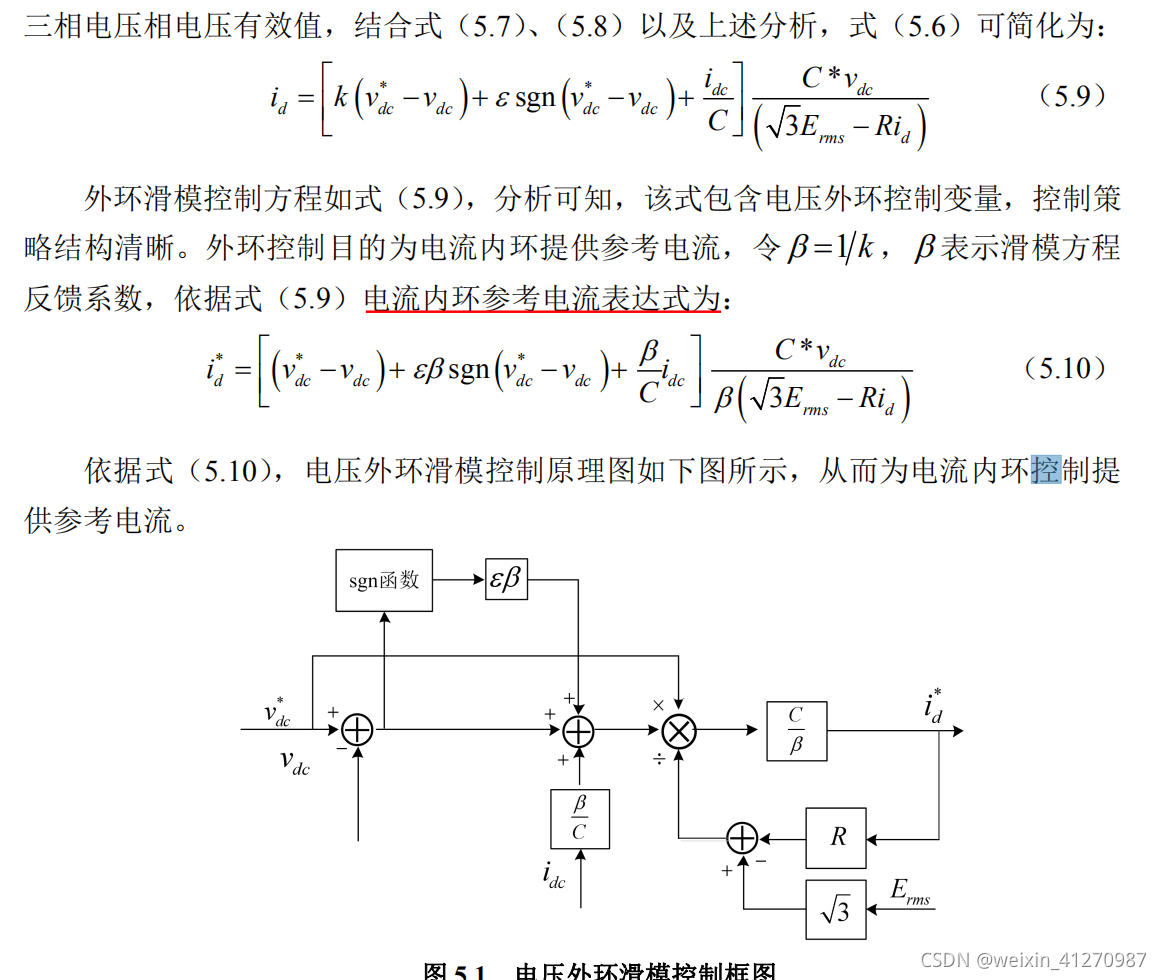
电压外环滑膜控制设计

3.7 电压外环PI控制设计

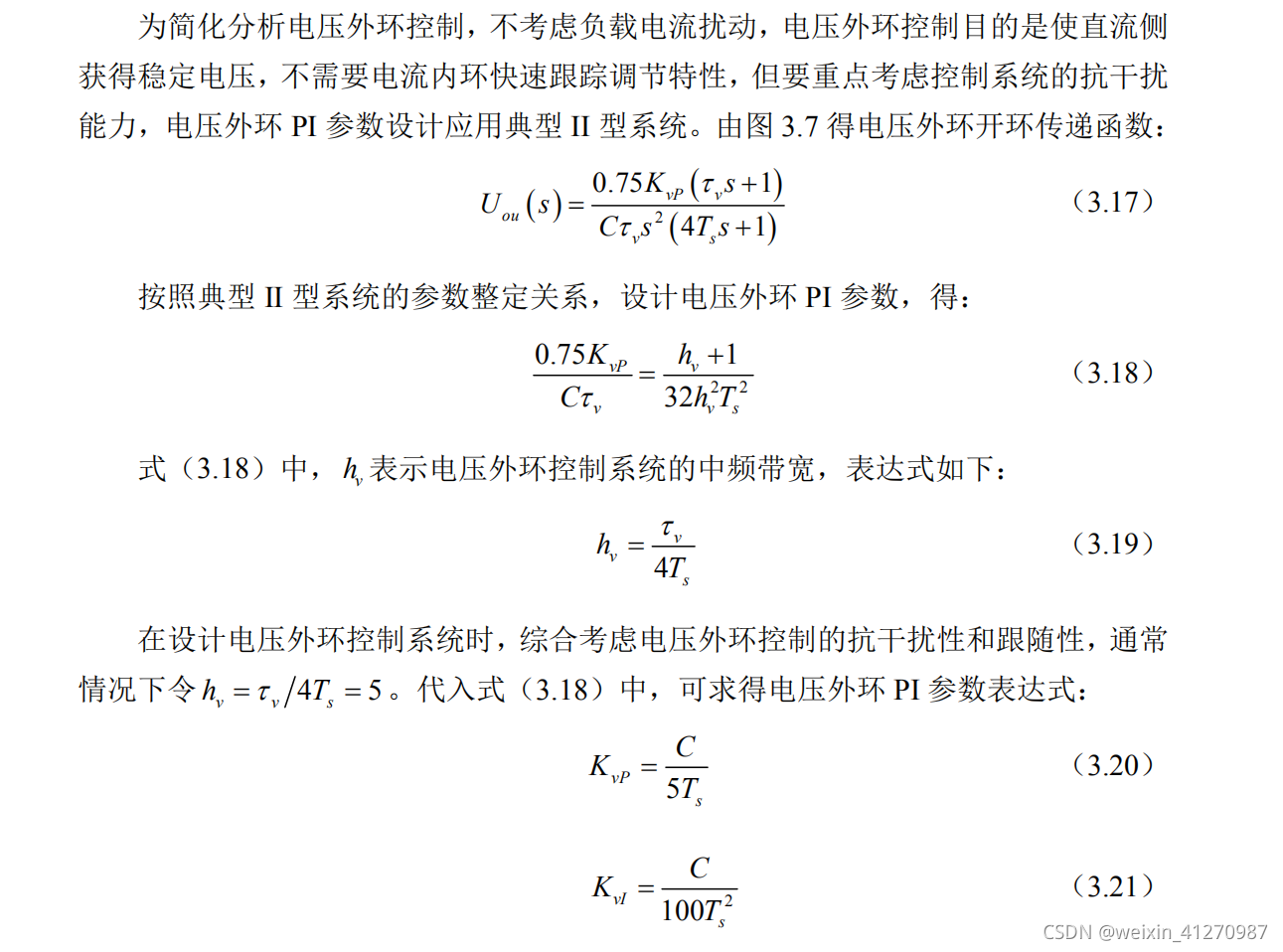
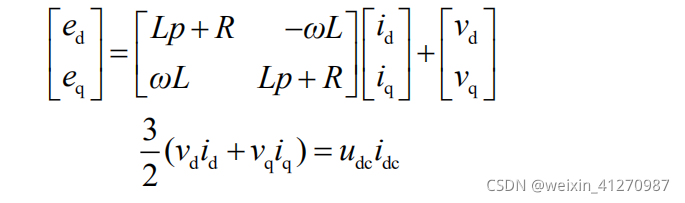
注解:根据交流侧和直流侧功率相等,可以知道:

所以可以根据母线电压Udc的变化量求出交流侧电感电流的值,提供给电流内环做参考。
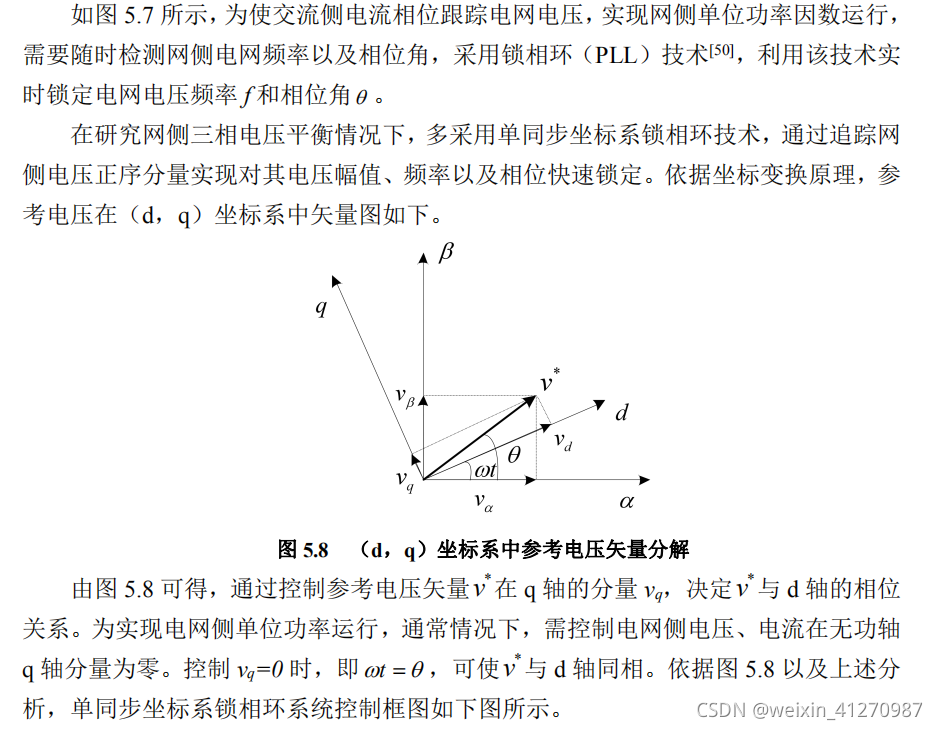
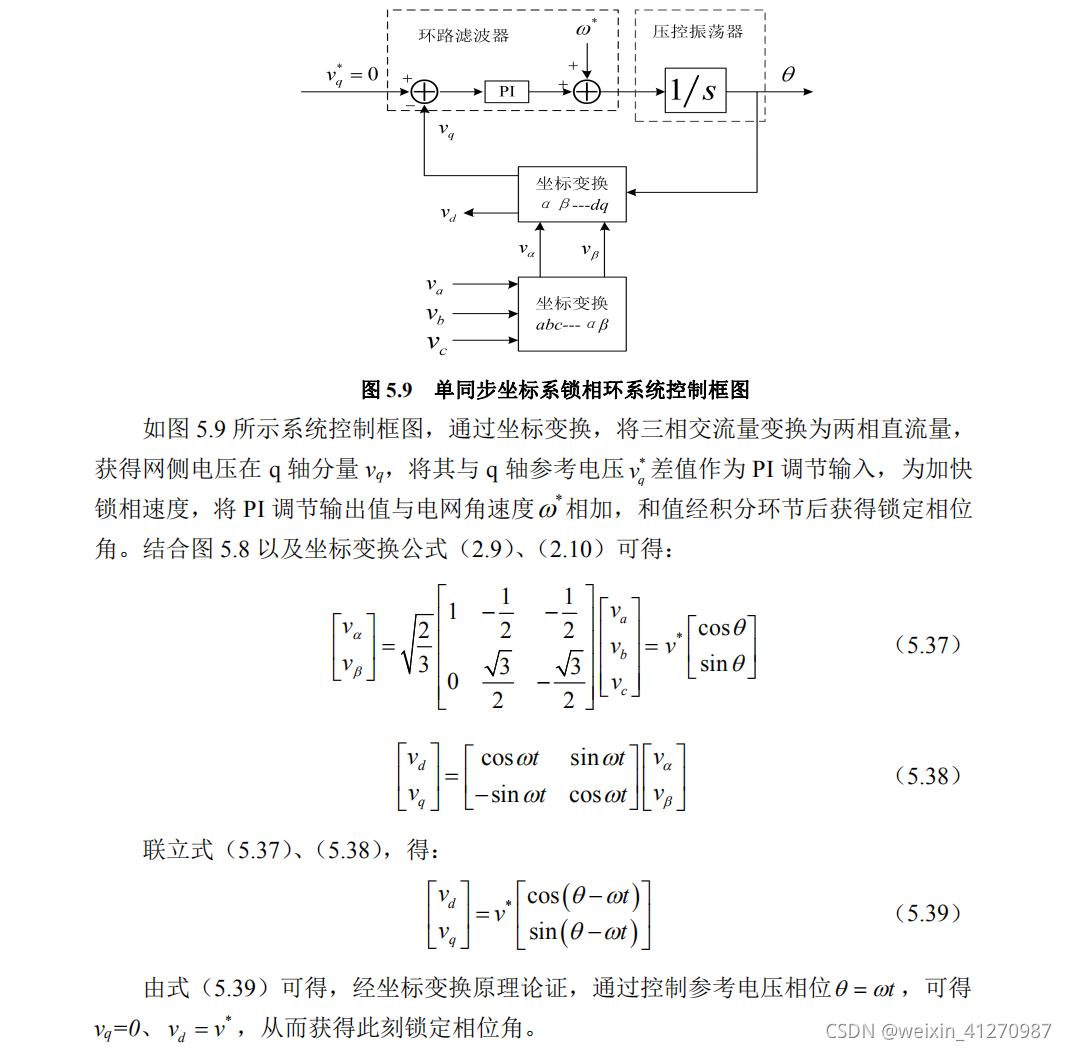
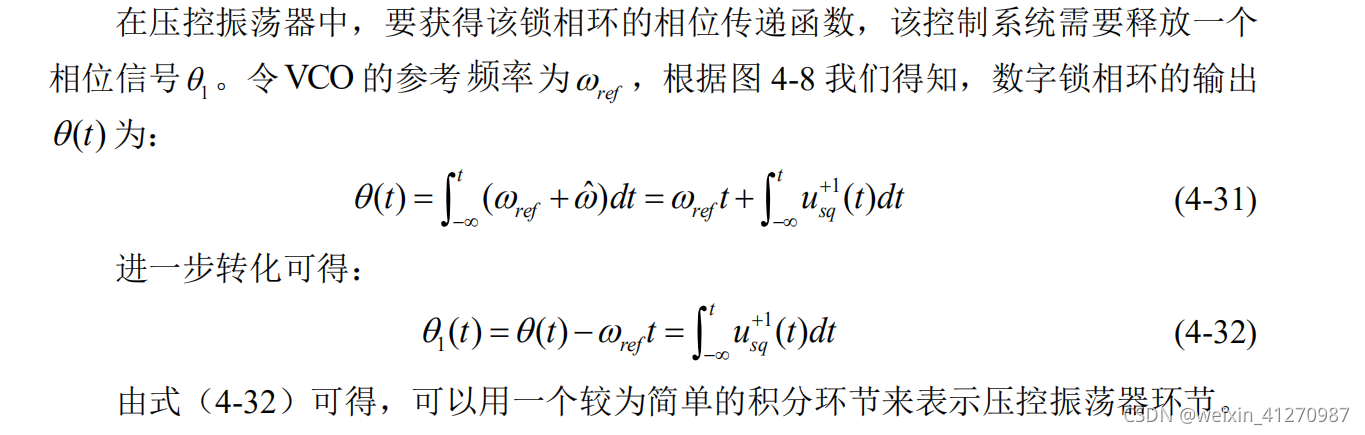
3.8 单同步锁相环
3.9 其他锁相环
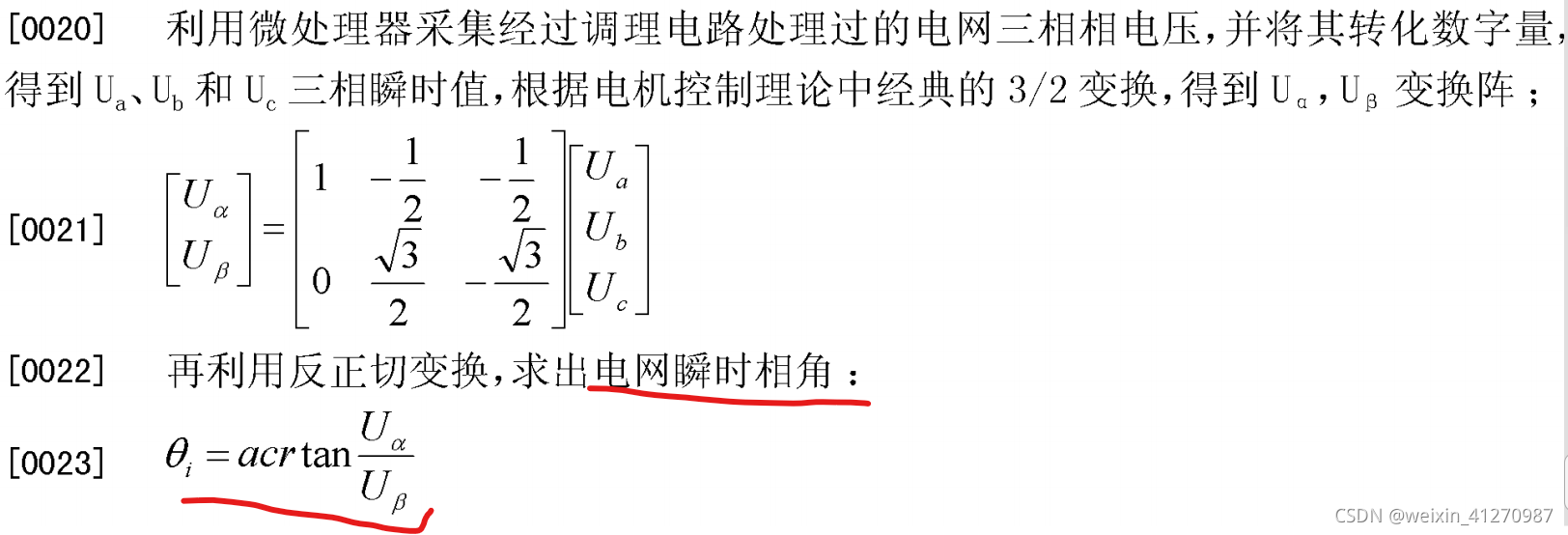
3.9.1 反正切锁相技术
在坐标变换中,只是变换了坐标,角度并没有改变。因此可以用反正切进行锁相求出当前拍的电网角度,在加上下一拍的角度增量,就可以锁住下一拍的角度,供使用。
3.9.2 过零点锁相
过零点鉴相是一种较为简单的开环锁相方法,其基本原理是通过实时监测电网电压过零点和频率信息来跟踪电网电压的相位,进而实现锁相。
以一相电网电压为例,当电网电压经过电压互感器处理后,通过过零点检测电路实时检测电压过零点,并分别在电压正负半周及正负过零点发出正方波和正脉冲信号,提供给cpu作为电网电压的同步基准信号,是的系统实时跟踪电网电压频率的变化。
实现过零点鉴相必须满足两个条件:
1.信号的周期和采样周期成整数倍关系;
2.采样点的时间间隔应当保持严格一致性。
这种方法的原理和结构比较简单,但是由于电网电压每个周期只有两个过零点,这就限制了锁相环的锁相速度,而且电网电压本身的畸变以及检测电路的各种干扰信号可能会导致过零点难以准确地被检测,甚至在过零点处导致过零信号的震荡。另外在电网不平衡时,这种方法无法通过某一相过零点的信息获取电网电压正序分量的相位信息。
3.9.3 乘法器锁相
乘法器锁相的原理比较简单。
Vin = Vmsin(wt) ,其中wt为相位角度;
假设Vin 为电网一相,则可以通过sin(wt) = Vin/Vm得到电网角度的实时正弦值。
再通过乘法器乘以此值就可以实时跟踪电网相位。
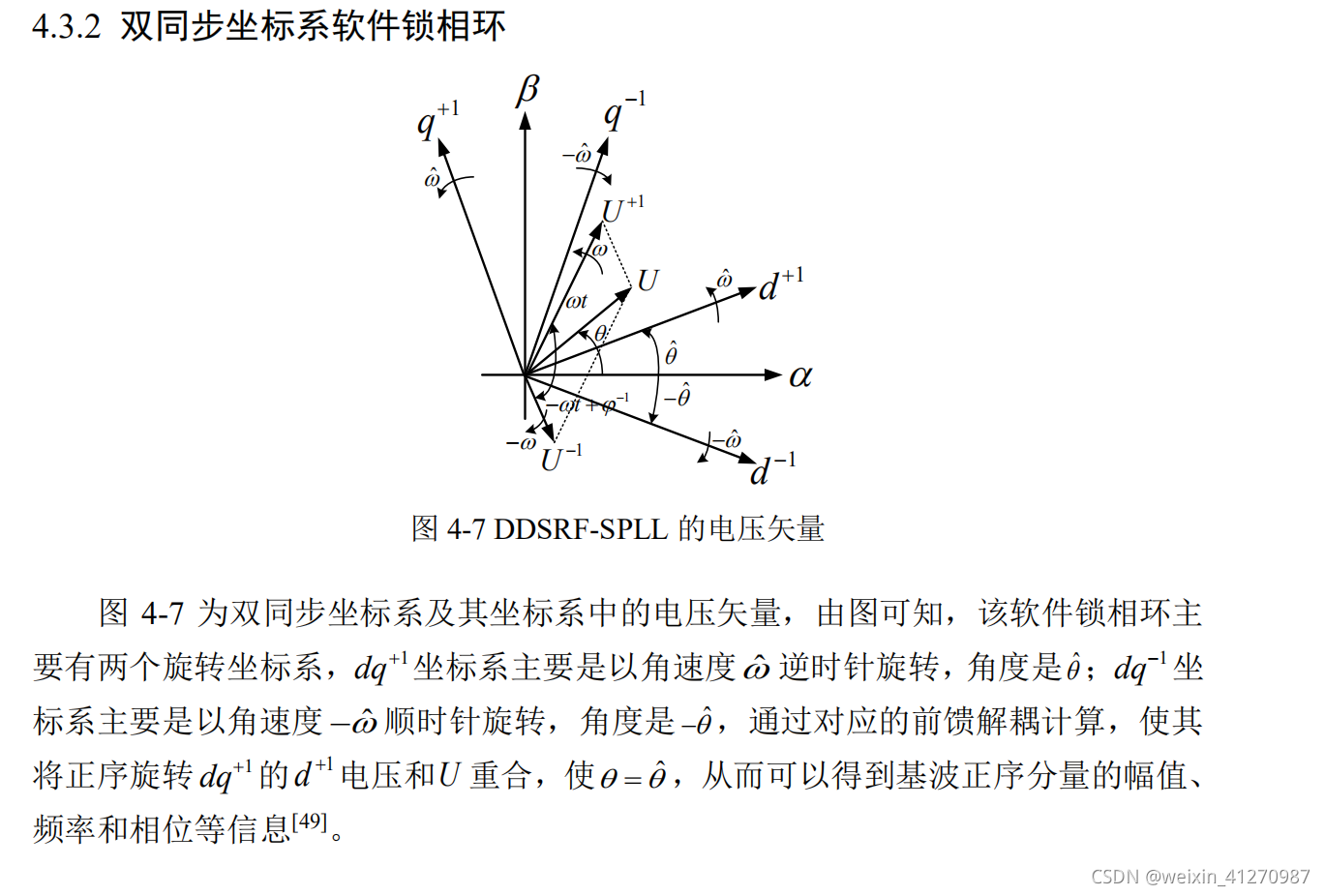
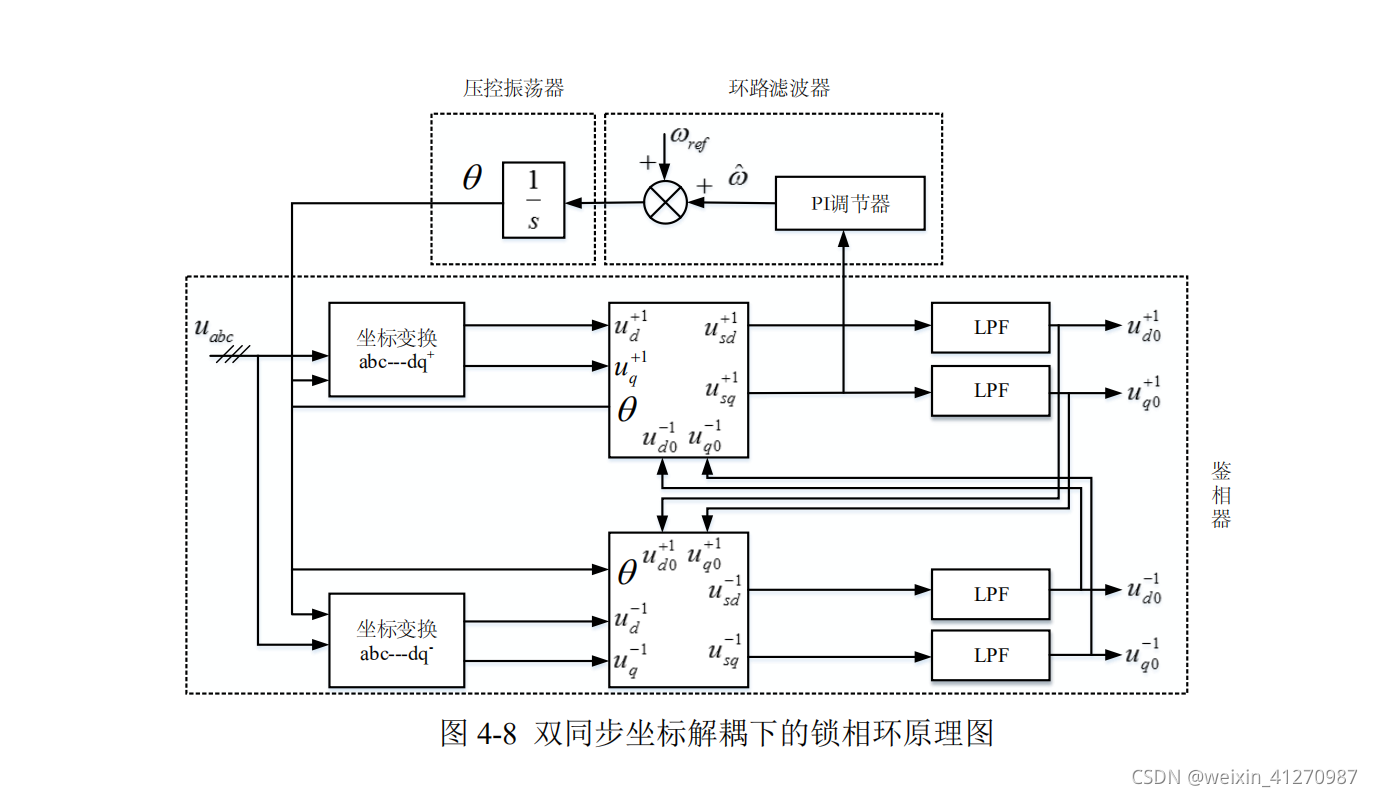
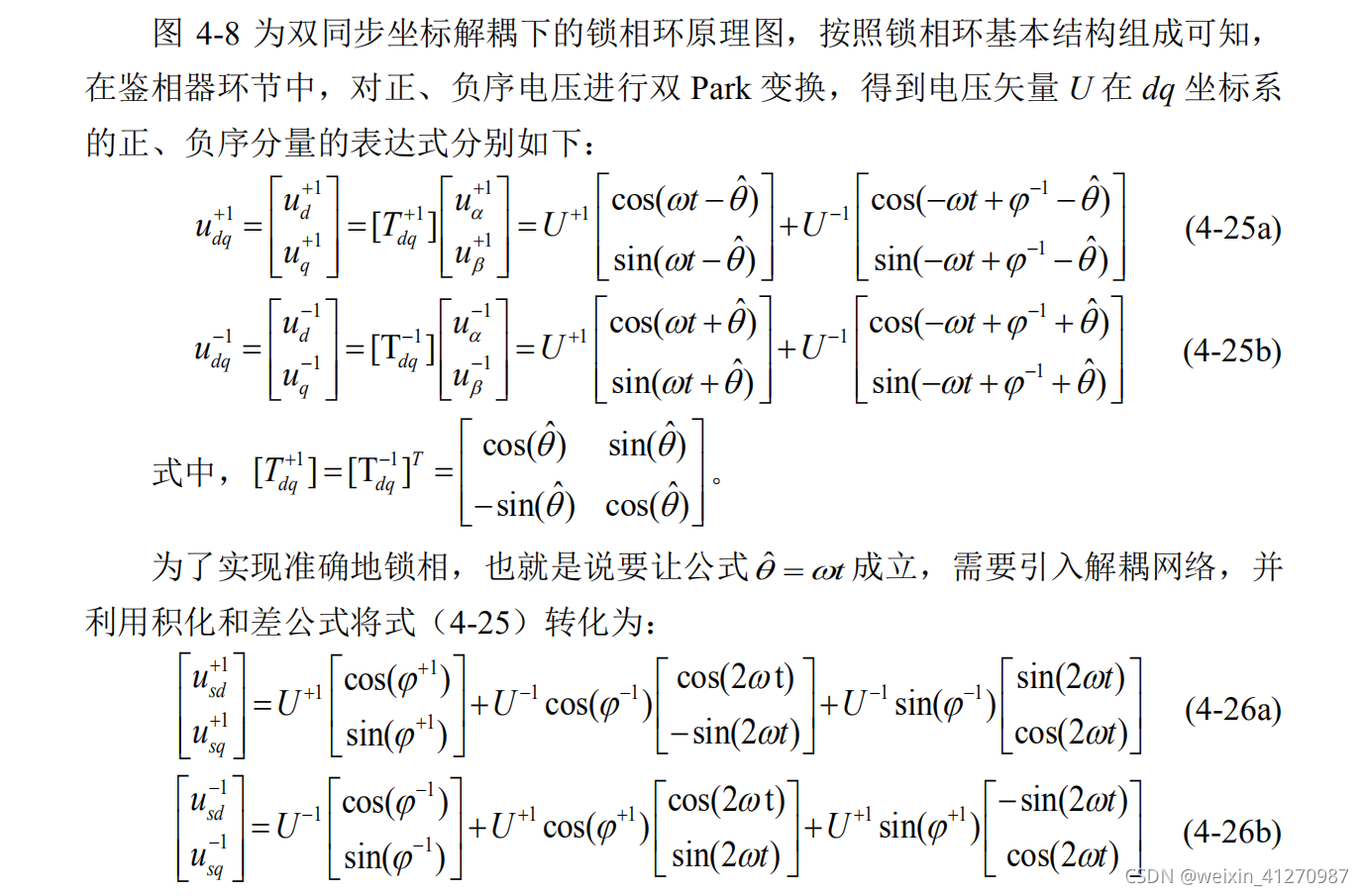
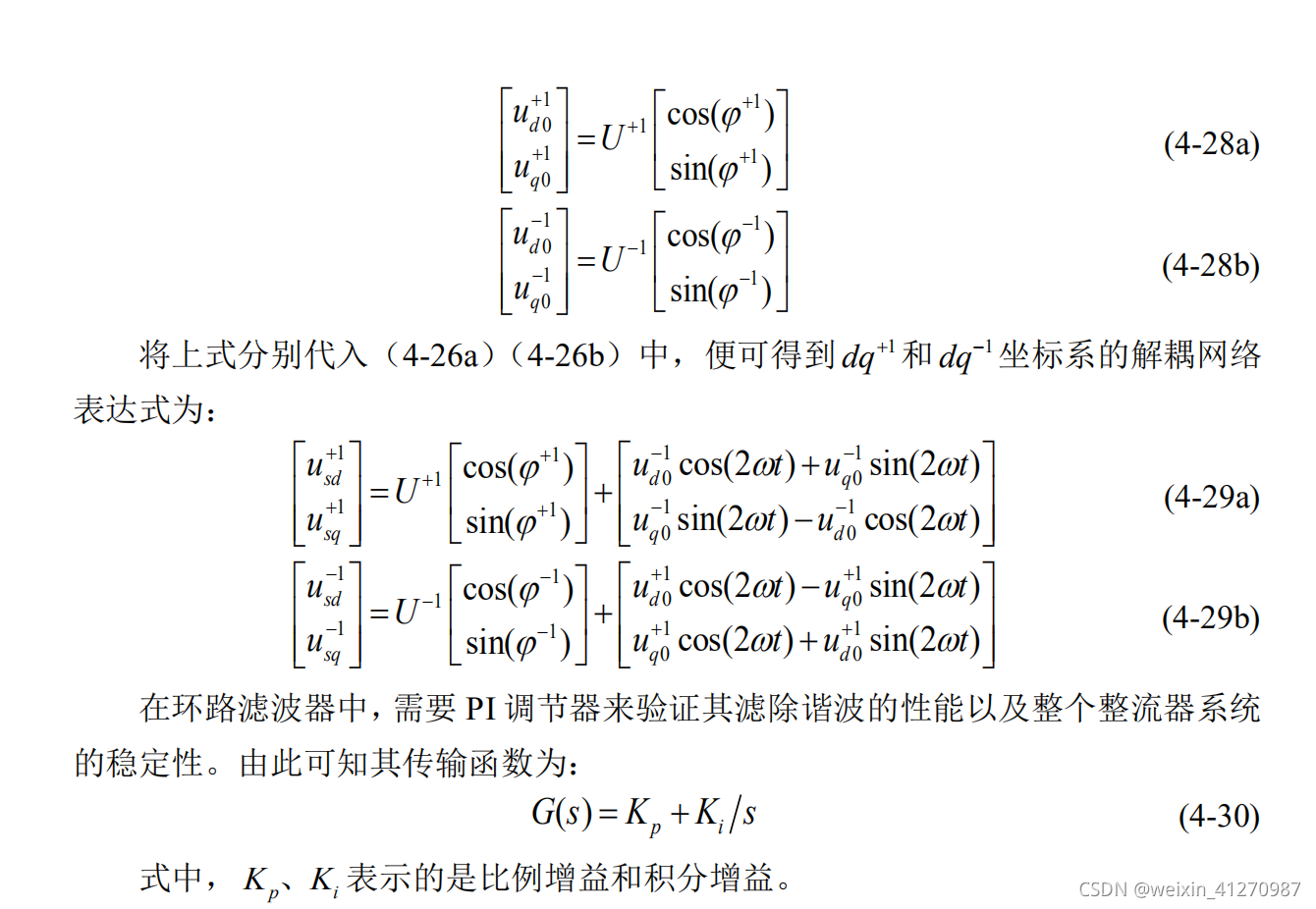
3.9.4 双同步坐标系的解耦软件锁相环
3.9.5 二阶广义积分器的软件锁相环
- wechat
- alipay