电机方面知识归纳
电机方面知识归纳
1 弱磁Id为什么要等于0
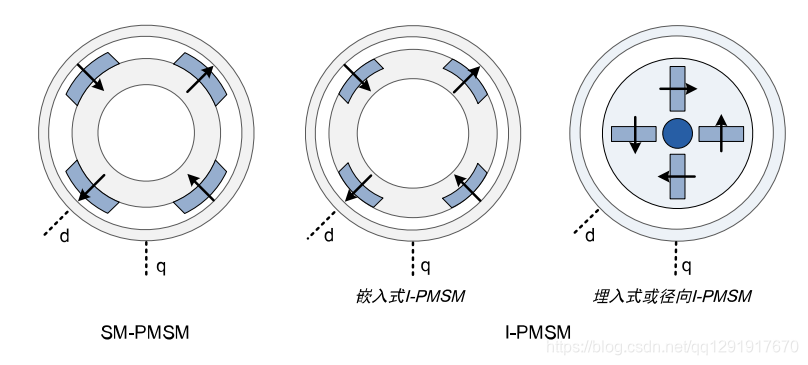
PMSM的机械机构分为3种,SM-PMSM,I-PMSM,第二个又分为2种,具体机械结构不多说了,主要是它们的磁路设计有区别,从而造成表贴磁钢(SM-PMSM)的其Lq=Ld,而内嵌磁钢(I-PMSM)的Ld < Lq,这个特性会造成软件算法的区别,一般的资料上介绍对于单纯的FOC算法,需要使Id=0,也就是说直轴电流为0,这时马达的特性接近直流电机,可以按直流电机算法控制,如果需要加弱磁控制的话,需要附加-Id电流,是电机克服马达本身磁阻扭矩,使得速度达到额定速度以上,当然这些也同时丧失了交轴电流扭矩,从而造成转矩下降。但是这些是理论的算法,一般的马达本身远比这些复杂的多,所以不可能达到这些条件,对于SM-PMSM的电机,近似可以使用Id=0的算法实现。
2 环路调节
由里到外,由快到慢。由里到外就是说先调内环,再调外环,一般内环是快环,外环一般是慢环,比如电流环为内环,其频率一般到10-50KHz,速度环,转矩环或者位置环为外环一般为10Hz-10KHz,因为这是闭环控制特性决定的,自控原理中这样讲的,内环必须完全响应外环的改变,如果反过来,系统势必不稳定或者较大震荡。
3 不同的速度PID
针对不同的速度闭环,其PID参数都要做相应的调整,应该根据实验结果,做好记录,最后在程序里面体现出来,可以做几个速度段的PID参数对应表,当然越详细越好了。
4 最低的平稳转速与哪些参数相关
- 电流环和速度环的PID参数是否合适,电流环的响应速度,速度环的响应速度,位置环的响应速度。
- 马达的极对数,决定了马达可以到达的最低物理转速,有编码器那就更佳了。
5 程序中有没有驱动电路工作状态检测?比如程序可以探测到MOS管损坏或电机短路?
6个硬件保护功能,分别是单相过流(正反向电流)保护、母线过流(正反向电流)保护、刹车过流(正反向电流)保护、母线过压保护、母线欠压保护、温度过高保护。
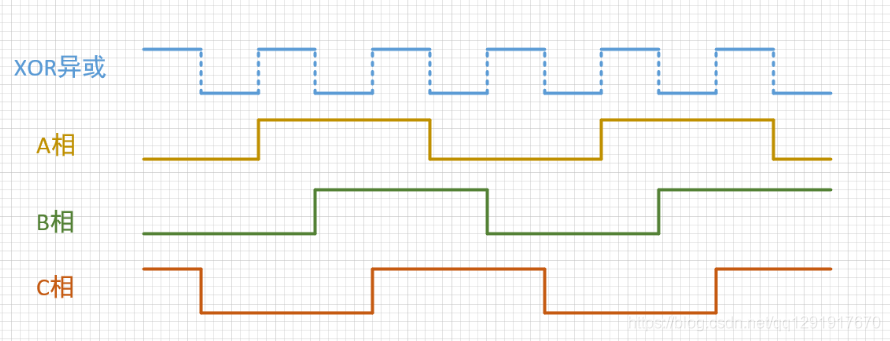
6 BLDC无刷直流电机的UVW如何与霍尔信号线对应起来
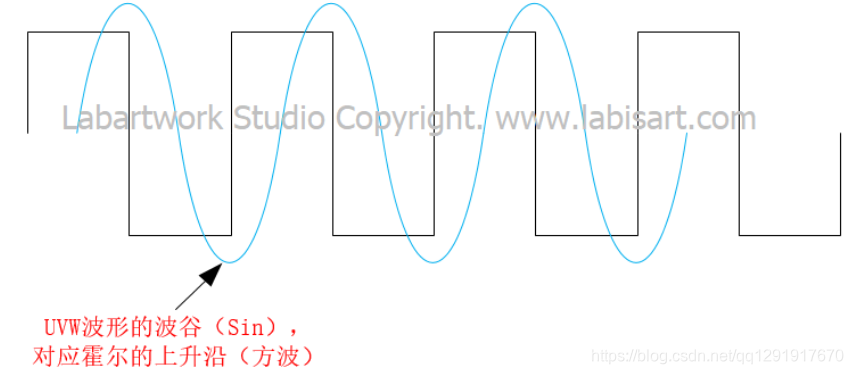
7 电机霍尔检测原理
BLDC的霍尔接入定时器的CH1、2、3,然后使用HALL的功能,也就是3个异或再进行检测。
8 永磁电机结构
- 表贴式PMSM(缩写为 SM-PMSM),该结构将磁铁置于电机表面。
- 内嵌式PMSM(缩写为 I-PMSM),该结构将磁铁嵌入到了转子结构中。
9 频率f和转速n
频率是做圆周运动的物体在1s内转过的圈数,单位是r/s,即Hz。电机的运动为圆周运动。转速是做圆周运动的物体在单位时间内转过的圈数,其单位是r/min或r/s。频率结果可为小数,而转速一般为整数。如果单位均为r/s,则频率和转速在数值上相等。
电机中频率和转速的关系:n = 60f / p(转速n的单位是rpm,f的单位是Hz,p为极对数)。如:电机转速就是2000rpm,当电机极对数p=4时,算出来频率f=400/3,从而周期T=3/400=0.0075s。
 wechat
wechat- alipay